OpenAI Gym, Pong, Derin Takviyeli Ogrenme (Deep Reinforcement Learning)
Otomatik oyun oynamak ve alakalı diğer problemler için son zamanlarda yapay zeka'nın alt dallarından takviyeli öğrenme (reinforcement learning) revaçta. Gö şampiyonunu yenen Google Deepmind algoritmasi bir TO yaklaşımı kullandı. TO ile algoritma bir oyundan gelen sadece ham pikselleri kullanarak oyunu kendi başına oynamayı öğrenebiliyor. En son oturumda kazanıp kaybedildiği bir ceza ya da mükafat skoru ile algoritmaya bildirilir tabii, ve yüzlerce otomatik oyun sonrası program oynamayı öğrenir.
Takviyeli öğrenim iş dünyası için faydalı olabilir, YZ etrafında danışmanlık servisi veren şirketler eskiden endüstriyel mühendisliğin şemsiyesi altına düşen ve simplex, lineer programlama ile çözülen problemleri TO ile çözmeye başladılar. TO ile bir ilke gradyanı (policy gradient) hazırlanır, ilkeler her adımda atılabilecek adımları tanımlarlar; bir fabrikada bir aletin üzerindeki ayarlar, ya da hangi kaynaklara öncelik verilmesi gerektiği (hangi gün, kaç işçi, vs), bir anlamda bu ilkelerden gelebilecek aksiyonlar olarak görülebilir, ve TO en "başarılı" olacak ayarları öğrenebilir.
Oyunlara dönelim, simülasyon ortamlarından OpenAI Gym üzerinden
sudo pip install gym[atari]
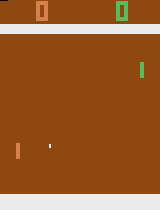
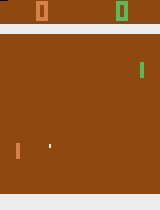
ile ünlü oyun Pong ortamı kurulur. Oyundan gelen pikseller matris olarak arayüzden alınabiliyor. Alttaki örnekte Pong başlatıyoruz, alınan her kareyi bir imaj png dosyasına yazıyoruz, bu arada rasgele hareketle yapıyoruz, kayıp ya da başarı var ise döngüden çıkıyoruz. Her step çağrısı bizim attığımız bir adımı oyuna bildiriyor, bilgisayar karşılık veriyor, ve oyunun son hali bize step dönüş parametreleri ile bildiriliyor. Bizim step ile kontrol ettiğimiz sağdaki raket, bilgisayar soldakini kontrol ediyor. Pong'u fazla anlatmaya gerek yok herhalde, basit bir oyun, raketler yukarı ya da aşağı gidiyor, step ile verdiğimiz hareket parametresi 0,1 etkisiz, 2,4 yukarı, 3,5 aşağı demek. Bilgisayar oynarken tabii ki bilgiyi "içeriden" alıyor, diğer tahtanın, topun nerede olduğunu iç arayüz ile anlıyor. Dışarıdan piksellere bakarak oynamaya uğraşmak çok daha zor bir iş.
import gym, random, time
import pandas as pd
import numpy as np
from PIL import Image
env = gym.make("Pong-v0")
n_outputs = env.action_space.n
print 'kac hereket', n_outputs
env.reset()
# ilk kismi atla
for i in range(20): obs, reward, done, info = env.step(0)
while True:
obs, reward, done, info = env.step(random.choice([0,1,2,3,4,5]))
if np.abs(reward) > 0.0: break
im = Image.fromarray(obs)
im.save('out.png')
time.sleep(0.4) # zaman arasi
Imaj kaydi yerine direk ekranda gostermek icin env.render() cagrisi da yapilabilir.


TO bağlamında öğrenim rutini üstteki döngüyü yüzlerce, binlerce kez işletebilir, her oturum sonundaki başarı / kayıp ilke gradyanı ile güncelleme için kullanılır.
Detaylar için şu blog güzel.
Alınan imaj üzerinde bazı önişlemler mümkün, mesela en üstteki skor bölümü oyun için gerekli mi? Bunlar kırpılabilir. Ayrıca renk gerekli olmayabilir, 3 renk kanalı 1 kanala iner. Küçültme yapılarak 210x160 boyutu mesela 80x80'e indirilebilir. Bir diğer önişlem şu: Karpathy (üstteki bağlantı) ardı ardına gelen iki oyun karesinin farkını alıyor, böylece hareket bilgisini yakalamak istemiş herhalde. Alternatif bir yaklaşım Stanford Üniversite'sindeki RL dersinin yaklaşımı, bu arkadaşlar ardı ardına 4 karenin üzerinden bir maxpool hesabı yapıyorlar, yani 4 karede birbirine tekabül eden piksellerden en yüksek değeri olan nihai sonuca alınıyor. Böylece 4 kare 1 kareye indirgeniyor, bu hem hareketi verir, hem de eğitim algoritmasinin 4 kat daha hızlı işlemesini sağlar (kod yazının altında)
Ayrica bkz OpenAI, Çubuklu Araba, CartPole
Ekler
Pong için tarif edilen her 4 karede bir imaj veren max pool kodu
import gym
from collections import deque
def greyscale(state):
state = np.reshape(state, [210, 160, 3]).astype(np.float32)
state = state[:, :, 0] * 0.299 + state[:, :, 1] * 0.587 + state[:, :, 2] * 0.114
state = state[35:195] # crop
state = state[::2,::2] # downsample by factor of 2
state = state[:, :, np.newaxis]
return state.astype(np.uint8)
class MaxAndSkipEnv(gym.Wrapper):
def __init__(self, env=None, skip=4):
super(MaxAndSkipEnv, self).__init__(env)
self._obs_buffer = deque(maxlen=2)
self._skip = skip
def _step(self, action):
total_reward = 0.0
done = None
for _ in range(self._skip):
obs, reward, done, info = self.env.step(action)
self._obs_buffer.append(obs)
total_reward += reward
if done:
break
max_frame = np.max(np.stack(self._obs_buffer), axis=0)
max_frame = greyscale(max_frame)
return max_frame, total_reward, done, info
def _reset(self):
self._obs_buffer.clear()
obs = self.env.reset()
self._obs_buffer.append(obs)
return obs
Kullanmak için tek bir imaj basalım
from PIL import Image
env = gym.make("Pong-v0")
m = MaxAndSkipEnv(env)
m._reset()
for i in range(20): obs, reward, done, info = env.step(0)
max_frame, total_reward, done, info = m._step(0)
im = Image.fromarray(max_frame[:,:,0], 'L')
im.save('out.png')
Aya İniş (LunarLander)
Test ortamlarindan biri aya inis yapacak bir uzay modulunu kontrol etmek. Yanliz bu ortami kullanmak icin bazi ek kuruluslar lazim,
pip3 install gym[box2d]
pip3 install box2d
pip3 uninstall box2d-kengz
Simdi
import gym
env = gym.make('LunarLander-v2')
env.reset()
for _ in range(500):
env.render()
env.step(env.action_space.sample())
ortami gorebiliriz.
Yukarı