Simulatorden Deger Toplamak
Simbad adli robot simulatorunden bahsetmistik. Bu simulatorde isleyen robotun aninda (online) Sci/Numpy hesaplarini yapacak kodlarla iletisiminde SrPy tavsiye etmistik. Fakat, aslinda test amacli olarak, Jython uzerinden simulatoru bir kez isletip, olcum verilerini bir dosyada toplamak, sonra ayri anlik olmayan (offline) bir sekilde o dosya uzerinde Python hesap kodlari isletmek te olabilir. Boylece SrPy'a gerek kalmaz.
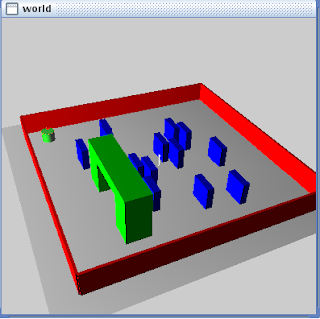
Ustte ornek bir Simbad dunyasi (kodu altta). Sol ust kosedeki robot uzerinde 12 tane sonar algilayicisi var, bu algilayicilar 0'incisi en onde olmak uzere saat yonu tersine dogru artan sekilde esit araliklarla robotun uzerine takili ve verileri her '10 sayac degerinde bir' olmak uzere okunup dosyaya yaziliyor. Ayrica her 'ileri' ve 'sola don' komutlari ayni dosyaya tek bir satir olmak uzere yazilmakta. Ekte verilen cikti dosyasinda 'Inf' degerleri goruluyor, bu sonar algilayicisinin 'sonsuz (infinity)' degerini dondurdugu anlamina geliyor, yani onunde buyuk bir bosluk var, ve algilanabilecek bir engel varsa bile, cok uzakta. Bu durum gercek dunyadaki sonar verileriyle uyusuyor aslinda, cogunlukla Inf degerleri islenmeden gecilir (discard).
Bizim makinada her saniye basina 20 sayac degeri dusuyor, ona gore kinematik hesaplari yapabilirsiniz.
Jython ile dunyayi baslatip "Run" tusuna basinca, robot dunya cevresinde tam bir tur atacak, sonra ilk asagi gidisi bir daha tekrarlayacak, bu sirada verileri toplayacak. Ornek veri dosyasi da ekte bulunabilir.
Yukarı