Tam Varyasyon ile Gürültüyü Yoketmek (Total Variation Denoising)
Bir sinyalden, görüntüden gürültüyü silmek için optimizasyon kullanılabilir. Orijinal sinyal $x$'in $y = B x + n$ ile bir $n$ gürültüsü eklenerek bozulduğu (corrupted) farzedilebilir ($B$ bir değişim matrisidir, tutarlı, bilinen değişimleri temsil eder) biz eldeki $y$ ile $x$'i kestirmeye uğraşırız. Fakat literatürde iyi bilindiği üzere $x$'i $y$'den tahmin etmeye uğraşmak kötü konumlanmış (ill-posed) bir sorudur. Çözüm olabilecek pek çok $x$ bulunabilir, bu sebeple arama alanını bir şekilde daraltmak gerekir, ve bunun için bir tür düzenlileştirme / regülarizasyon (regularization) kullanılması şarttır [3].
Bir sayısal resimden gürültü çıkartma alanında iyi bilinen bir yöntem problemi çift hedefli bir halde konumlandırmak [4],
$$ || x-x_{cor}||2, \qquad \phi_{tv} (x) = \sum_{i=1}^{n-1} | x_{i+1} - x_i | \qquad (1) $$
Burada $x_{cor} \in \mathbb{R}^n$ bize verilen bozulmuş sinyal, $x \in \mathbb{R}^n$ ise bulmak istediğimiz, gürültüsü çıkartılmış sinyal, $\phi_{tv}$ ise tam varyasyon fonksiyonu. Üstteki iki hedefi minimize etmek istiyoruz, böylece aynı anda hem sinyalin kendi içindeki varyasyonu azaltan hem de bozulmuş sinyale mümkün olduğunca yakın duran bir gerçek $x$ elde edebilelim.
Her iki hedef fonksiyonunu birleştirip tek bir fonksiyon haline getirip onu kısıtlanmamış (unconstrained) bir optimizasyon problemi olarak çözebiliriz,
$$ \psi = || x-x_{cor}||2^2 + \mu \phi_{tv} $$
ki $\mu$ bizim seçeceğimiz bir parametre olabilir. Çözüm için mesela Newton metodunu kullanabiliriz, fakat tek bir problem var, Newton ve ona benzer diğer optimizasyon metotları için türev almak gerekli, fakat $\phi_{tv}$'deki L1-norm'unun (tek boyutta mutlak değer fonksiyonu) $x=0$'da türevi yoktur (birinci terimdeki Oklit normunun karesi alındığı için onun iki kere türevi alınabilir). Bu durumda $\phi_{tv}$'yi yaklaşık olarak temsil edebilirsek, onun da türevi alınır hale gelmesi sağlayabiliriz. Bu yeni fonksiyona $\phi_{atv}$ diyelim,
$$ \phi_{atv} = \sum_{i=1}^{n-1} \left( \sqrt{ \epsilon^2 + (x_{i+1})-x_i } - \epsilon \right) $$
ki $\epsilon > 0$ yaklaşıklamanın seviyesini ayarlıyor. Bu fonksiyonun iyi bir yaklaşıklama olduğunu görmek zor değil, toplam içindeki kısmı deneyerek görelim,
import numpy as np
eps = 1e-6
mu = 50.0
def norm_tv(x):
return np.sum(np.abs(np.diff(x)))
def norm_atv(x):
return np.sum(np.sqrt(eps + np.power(np.diff(x),2)) - eps)
xcor = np.random.randn(1000)
print (norm_tv(xcor))
print (norm_atv(xcor))
1103.2561038302395
1103.2571969067808
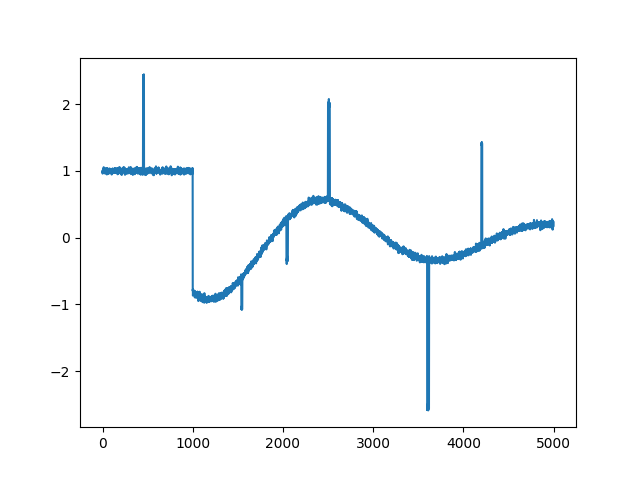
Üstteki fonksiyonun iki kez türevi alınabilir. Şimdi analitik şekilde devam etmeden önce pür sayısal açıdan bir çözüme bakalım. Üstteki fonksiyonları direk kodlayarak ve sayısal türev üzerinden işleyebilen bir kütüphane çağrısıyla hedefi minimize edelim, eldeki sinyal,
import pandas as pd
df = pd.read_csv('xcor.csv',header=None)
xcor = np.reshape(np.array(df[0]), (5000,1))
plt.plot(range(len(xcor)), xcor)
plt.savefig('func_60_tvd_01.png')
Kütüphane çağrısı ile
x0 = np.zeros(len(xcor))
from scipy.optimize import minimize, Bounds, SR1, BFGS
def phi(x):
return np.sum(np.power(x-xcor, 2)) + mu*norm_atv(x)
opts = {'maxiter': 400, 'verbose': 2}
res = minimize (fun=phi,
x0=x0,
options=opts,
jac='2-point',
hess=BFGS(),
method='trust-constr'
)
plt.plot(range(5000), res.x)
plt.savefig('func_60_tvd_02.png')
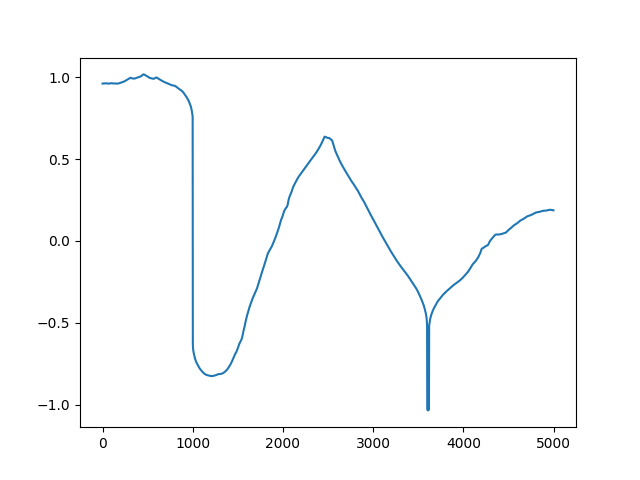
Sonuç fena olmadı. Fakat üstteki yaklaşımın hesabı uzun sürecektir, eğer eldeki problem hakkında bazı ek şeyler biliyorsak, bu bilgileri dahil ederek elde edilen çözüm daha hızlı olabilir. Mesela analitik olarak türevler Jacobian ve Hessian bulunabilir, Newton adımı elle kodlanabilir, ayrıca problemdeki matrislerde muhtemel bir seyreklikten (sparsity) faydalanılabilir.
Hedef fonksiyonu, $\psi(x)$ diyelim, için birinci ve ikinci türev,
$$ \nabla \psi(x) = 2 (x-x_{cor}) + \mu \nabla \phi_{atv}(x), \qquad \nabla^2 \psi(x) = 2 I + \mu \nabla^2 \phi_{atv} (x) $$
Zincirleme Kuralı uygulandı tabii, ve şimdi $\phi_{atv}$ üzerindeki türevleri bulmak gerekiyor. Sorun değil, daha önceki yaklaşıklamayı bunun için yapmıştık zaten. Yaklaşık fonksiyonu genel olarak belirtirsek,
$$ f(u) = \sqrt{\epsilon^2 + u^2} - \epsilon $$
Bu fonksiyonun 1. ve 2. türevi
$$ f'(u) = u(\epsilon^2 + u^{-1/2} ), \qquad f"(u) = \epsilon^2 (\epsilon^2 + u^2)^{-3/2} $$
Şimdi bir $F$ tanımlayalım,
$$ F(u_1,..., u_{n-1}) = \sum_{i=1}^{n-1} f(u_i) $$
Yani $F(u)$ $u$'nun bileşenlerinin yaklaşık L1 norm'unun toplamıdır. Nihai amacımız bu tanımdan bir $\phi_{atv}$ ifadesine ulaşmak. $F$'in gradyanı ve Hessian'ı
$$ \nabla F(u) = \left[\begin{array}{ccc} f'(u_1) & \dots & f'(u_{n-1}) \end{array}\right] $$
$$ \nabla^2 F(u) = \mathrm{diag} \left[\begin{array}{ccc} f"(u_1) & \dots & f"(u_{n-1}) \end{array}\right] $$
Eğer bir ileri farklılık matrisi $D$ tanımlarsak,
$$ D = \left[\begin{array}{ccccc} -1 & 1 & & & \\ & -1 & 1 & & \\ & & \ddots & \ddots & \\ & & & -1 & 1 \end{array}\right] $$
O zaman $\phi_{atv}(x) = F(Dx)$ diyebiliriz. Bir $x$ vektörünü üstteki matris ile soldan çarpınca öğeleri $\left[\begin{array}{ccc} x_2-x_1 & x_3-x_2 & \dots \end{array}\right]$ şeklinde giden bir yeni vektör elde edeceğimizi doğrulamak zor değil. Yine Zincirleme Kuralını uygularsak,
$$ \nabla \phi_{atv}(x) = D^T \nabla F(Dx), \qquad \nabla^2 \phi_{atv}(x) = D^T \nabla^2 F(Dx) D $$
Hepsini bir araya koyarsak
$$ \nabla \psi(x) = 2(x-x_{cor}) + \mu D^T \nabla F(Dx) $$
$$ \nabla^2 \psi(x) = 2 I + \mu D^T \nabla^2 F(Dx) D $$
Kodlamayı alttaki gibi yapabiliriz,
import pandas as pd
import scipy.sparse as sps
import scipy.sparse.linalg as slin
MU = 50.0
EPSILON = 0.001
ALPHA = 0.01;
BETA = 0.5;
MAXITERS = 100;
NTTOL = 1e-10;
n = len(xcor)
data = np.array([-1*np.ones(n), np.ones(n)])
diags = np.array([0, 1])
D = sps.spdiags(data, diags, n-1, n)
x = np.zeros((len(xcor),1))
for iter in range(MAXITERS):
d = D.dot(x)
val1 = np.dot((x-xcor).T,(x-xcor))
val2 = np.sqrt(EPSILON**2 + np.power(d,2))
val3 = EPSILON*np.ones((n-1,1))
val = np.float(val1 + MU*np.sum(val2 - val3))
grad1 = 2*(x-xcor)
grad2 = MU*D.T.dot(d / np.sqrt(EPSILON**2 + d**2))
grad = grad1 + grad2
hess1 = 2*sps.eye(n)
hess2 = EPSILON**2*(EPSILON**2+d**2)**(-3/2)
hess2 = hess2.reshape((n-1))
hess3 = sps.spdiags(hess2, 0, n-1, n-1)
hess = hess1 + MU*hess3.dot(D).T.dot(D)
v = slin.spsolve(-hess, grad)
v = np.reshape(v, (n,1))
lambdasqr = np.float(np.dot(-grad.T,v))
if lambdasqr/2 < NTTOL: break
t = 1;
while True:
tmp1 = np.float(np.dot((x+t*v-xcor).T,(x+t*v-xcor)))
tmp2 = MU*np.sum(np.sqrt(EPSILON**2+(D*(x+t*v))**2)-EPSILON*np.ones((n-1,1)))
tmp3 = val - ALPHA*t*lambdasqr
if tmp1 + tmp2 < tmp3: break
t = BETA*t
x = x+t*v
plt.plot(range(n),xcor)
plt.plot(range(n),x,'r')
plt.savefig('func_60_tvd_03.png')
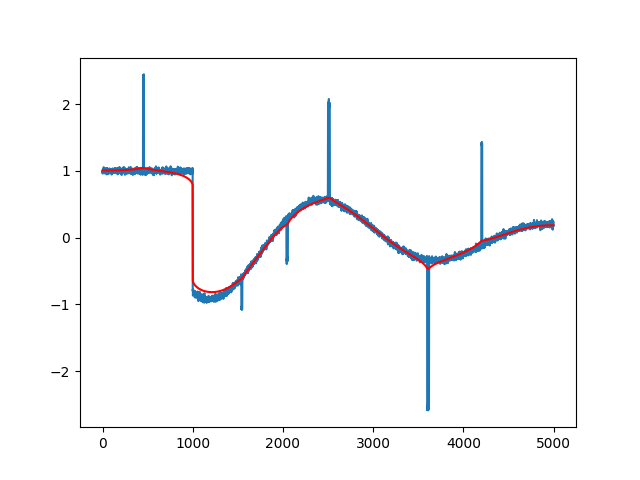
Çok daha iyi bir gürültüsüz sonuç elde ettik, üstteki bu işlem çok daha hızlı.
Görüntüden Gürültü Silmek
Aynen tek boyutlu sinyalden gürültü silebildiğimiz gibi iki boyutlu görüntüden de gürültü silmek mümkün. Bu durumda tam varyasyon
$$ \sum_{i=2}^{m} \sum_{j=2}^{n} (|U_{i,j} - U_{i-1,j}| + |U_{i,j} - U_{i,j-1}|) $$
olabilir, yani her pikselin bir yanindaki ve bir altındaki pikselle olan uzaklığının L1-norm'unu almak. Üstteki hesabı yapmak için aslında yine daha önce hesapladığımız $D$ matrisini kullanabiliriz. Bir $X$ imajı üzerinde $DX$ hesabı, yani $D$ ile soldan çarpım dikey farklılıkları, sağdan çarpım $XD$ ise yatay farklılıkları verecektir.
import scipy.sparse as sps
X = [[1, 2, 3, 4],
[5, 6, 7, 8],
[1, 2, 3, 4],
[5, 6, 7, 8]]
X = np.array(X)
print (X)
n = X.shape[0]
data = np.array([-1*np.ones(n), np.ones(n)])
diags = np.array([0, 1])
D = sps.lil_matrix(sps.spdiags(data, diags, n, n))
print (D.todense())
print ('Dikey Farklilik')
print (D.dot(X))
print ('Yatay Farklilik')
print (D.transpose().dot(X.T))
[[1 2 3 4]
[5 6 7 8]
[1 2 3 4]
[5 6 7 8]]
[[-1. 1. 0. 0.]
[ 0. -1. 1. 0.]
[ 0. 0. -1. 1.]
[ 0. 0. 0. -1.]]
Dikey Farklilik
[[ 4. 4. 4. 4.]
[-4. -4. -4. -4.]
[ 4. 4. 4. 4.]
[-5. -6. -7. -8.]]
Yatay Farklilik
[[-1. -5. -1. -5.]
[-1. -1. -1. -1.]
[-1. -1. -1. -1.]
[-1. -1. -1. -1.]]
L1 norm yaklaşıksallığı için daha önceki yöntemi kullanabiliriz.
Gradyan almak için ise bu sefer tensorflow paketini kullanacağız
[5]. Bir vektöre göre değil bir matrise göre türev alıyoruz, bunu sembolik
yapmak yerine sembolik yaklaşım kadar kuvvetli olan otomatik türev ile
gradyanı elde edebiliriz.
Üstteki tüm hesapları TF ile bir hesap grafiği içinde kodlayıp,
tf.gradients ile hedef fonksiyonunun gradyanını alacağız, ve
standart gradyan inişi optimizasyonu ile bir noktadan başlayıp gradyan yönü
tersinde adım atarak minimum noktaya varmaya uğraşacağız.
from skimage import io
import tensorflow as tf
MU = 50.0
EPSILON = 0.001
n = 225
img = io.imread('lena.jpg', as_gray=True)
io.imsave('lenad0.jpg', img)
img = io.imread('lena-noise.jpg', as_gray=True)
io.imsave('lenad1.jpg', img)
xorig = tf.cast(tf.constant( io.imread('lena-noise.jpg', as_gray=True)),dtype=tf.float32)
x = tf.placeholder(dtype="float",shape=[n,n],name="x")
D = np.zeros((n,n))
idx1, idx2 = [], []
for i in range(n):
idx1.append([i,i])
if i<n-1: idx2.append([i,i+1])
idx = idx1 + idx2
ones = [1.0 for i in range(n)]
ones[n-1] = 0
negs = [-1.0 for i in range(n-1)]
negs[n-2] = 0
vals = ones + negs
vals = np.array(vals).astype(np.float32)
D = tf.SparseTensor(indices=idx, values=vals, dense_shape=[n, n])
diff = tf.square(tf.norm(xorig-x, ord='euclidean'))
Ux = tf.sparse_tensor_dense_matmul(D, x)
Uy = tf.sparse_tensor_dense_matmul(tf.sparse_transpose(D), tf.transpose(x))
Uy = tf.transpose(Uy)
fUx = tf.reduce_sum(tf.sqrt(EPSILON**2 + tf.square(Ux)) - EPSILON)
fUy = tf.reduce_sum(tf.sqrt(EPSILON**2 + tf.square(Uy)) - EPSILON)
phi_atv = fUx + fUy
psi = diff + MU*phi_atv
g = tf.gradients(psi, x)
g = tf.reshape(g,[n*n])
init = tf.global_variables_initializer()
sess = tf.Session()
sess.run(init)
def tv(xvec):
xmat = xvec.reshape(n,n)
p = sess.run(psi, {x: xmat} )
return p
def tv_grad(xvec):
xmat = xvec.reshape(n,n)
gres = sess.run(g, {x: xmat} )
return gres
x0 = np.zeros(n*n)
xcurr = x0
N = 130
for i in range(1,N):
gcurr = tv_grad(xcurr)
gcurr /= gcurr.max()/0.3
chg = np.sum(np.abs(xcurr))
xcurr = xcurr - gcurr
xcurr /= xcurr.max()/255.0
io.imsave('lenad2.jpg', np.reshape(xcurr,(n,n)))



Yine total varyasyon kullanan ama farklı optimizasyon çözücüyle hesabı
yapan bir yöntem tlv_prim_dual.py kodunda [1], sonuç (soldaki)


Ayrıca cvxpy adlı bir paket üzerinden aynı şeyi kodlayabiliriz, yani
$$ \min_{\beta \in \mathbb{R}^n} \frac{1}{2} \sum_{i=1}^{n} (y_i - \beta_i)^2 + \lambda \sum_{(i,j) \in E)} |\beta_i - \beta_j| $$
import cvxpy
lam = 35.0
u_corr = plt.imread("lenad1.jpg")
rows, cols = u_corr.shape
U = cvxpy.Variable(shape=(rows, cols))
obj = cvxpy.Minimize(0.5 * cvxpy.sum_squares(u_corr-U) + lam*cvxpy.tv(U))
prob = cvxpy.Problem(obj)
prob.solve(verbose=True, solver=cvxpy.SCS)
plt.imshow(U.value, cmap='gray')
plt.imsave(lena4.jpg', U.value, cmap='gray')
Üstteki sağdaki resim bu sonucu gösteriyor. Bu yaklaşımda
cvxpy.tv ile tam varyasyon hesabını yapan kütüphanenin kendi iç
çağrısını kullandık.
Kaynaklar
[1] Mordvintsev, ROF and TV-L1 denoising with Primal-Dual algorithm, https://github.com/znah/notebooks/blob/master/TV_denoise.ipynb
[2] Chambolle, An introduction to continuous optimization for imaging, https://hal.archives-ouvertes.fr/hal-01346507/document
[3] Afonso, Fast Image Recovery Using Variable Splitting and Constrained Optimization, http://www.lx.it.pt/~mtf/Afonso_BioucasDias_Figueiredo_twocolumn_v7.pdf
[4] Boyd, Additional Exercises for Convex Optimization https://web.stanford.edu/~boyd/cvxbook/bv_cvxbook_extra_exercises.pdf
[5] Bayramlı, Bilgisayar Bilim, Yapay Zeka, Tensorflow
Yukarı