Bu yöntemde bir sıvı veya gazın sanal parçacıklardan oluştuğu varsayılır ve bu sıvı parçacıkları bir simülasyon bölgesinde hareket edebilir, diğer sıvı parçacıklarıyla çarpışabilir. Simülasyon alanı bir örgü / ızgara sistemi olarak ele alınır ve sıvı parçacıkları düğümden düğüme hareket eder; yani bir bölge içinde serbestçe hareket edemezler. Bu yöntemin moleküler dinamik yöntemine kıyasla en önemli farkı ızgara Boltzmann yönteminin sıvı parçacıklarının konumlarını ve hızlarını değil, parçacıkların hız dağılım fonksiyonunu kullanarak hesap yapmasıdır [3, sf. 24].
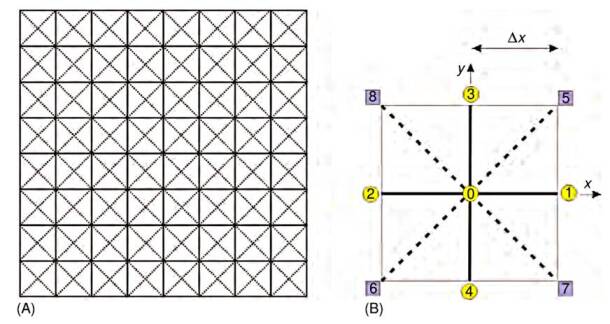
Aşağıda iki boyutlu bir sistem için ızgara Boltzmann yöntemi şekli var. (A), bir simülasyon bölgesinin ızgara sistemine bölündüğünü göstermektedir. (B) ise birim kare ızgara hücresinin büyütülmüş halidir. Moleküllerin grupları veya kümeleri olarak ele alınan sanal sıvı parçacıklarının yalnızca komşu düğümlere hareket etmesine izin verilir, daha uzak düğümlere değil. Yani 0 düğümündeki sıvı parçacıklarının bir sonraki zaman adımında orada kalmasına ya da 1, 2, .., 8 numaralı düğümlere hareket etmesine izin verilir. Bu hareket kısıtlaması hareket hızını da standardize eder ve basitleştirir. 1, 2, 3 ve 4 numaralı düğümlere hareket eden sıvı parçacıklarının \(c = \Delta x / \Delta t\) hızı olacaktır, 5, 6, 7 ve 8 numaralı düğümlere hareket edenlerin ise \(\sqrt{2}c\) hızına sahip olmalıdır; burada \(\Delta x\) en yakın iki düğüm arasındaki ızgara aralığı ve \(\Delta t\) simülasyonlar için zaman aralığıdır. \(\sqrt{2}c\) değeri, (B)’deki köşegen mesafenin \(\sqrt{\Delta x^2 + \Delta x^2} = \sqrt{2}\Delta x\) olduğu ve buradaki hızın \(\sqrt{2}\Delta x / \Delta t\), yani önceki \(c\)’nin \(\sqrt{2}\) katı olacağından hesaplanabilir.
Bu yöntemin gerekli denklemlerini türetmeye başlayalım. Daha önce [1]’de Boltzmann taşınım denkleminin şu şekilde olduğunu gördük:
\[\frac{\partial f}{\partial t} + c \cdot \nabla f = \Omega\]
\(\Omega\), moleküller hareket ettikten sonra gerçekleşebilecek çarpışmaları temsil eder; \(dr\, dc\) aralığındaki molekül sayıları arasındaki önce ve sonra arasındaki net farkı yakalar.
Hiç çarpışma olmasaydı, \(f()\) bağlamında önceki sayım sonraki sayımla tamamen aynı olurdu ve aralarındaki fark sıfır olurdu. Bunun olmadığı durumlarda sıfırdan farklı bir \(\Omega\)’ya ihtiyaç duyarız. Bu, \(\Omega\)’nın hesaplanmasının kolay olduğu anlamına gelmez. Gerçek bir çarpışma sayımı sistemdeki tüm olası çarpışmaları hesaba katmak zorunda olduğundan hesaplamak güçtür. Ancak çarpışma operatörünü çözümün sonucunda önemli bir hata ortaya çıkarmadan basit bir hesaplamayla yaklaşık olarak ifade etmek mümkündür [2, sf. 28]. \(\Omega\)’yı yaklaşık olarak ifade edebilmek için BGK yaklaşımı adı verilen bir yöntem geliştirilmiştir. BGK kaba ama zekice bir basitleştirmedir: tüm çarpışmaları hesaplamak yerine şu soruyu sorar: “Mevcut dağılım denge durumundan ne kadar uzakta ve ne kadar hızlı dengeye doğru meyili var?” Bu şu sonucu verir:
\[\Omega = \frac{1}{\tau}(f^{eq} - f)\]
burada \(f^{eq}\), Maxwell-Boltzmann dağılımıdır — [1]’de türettiğimiz denge dağılımı. Fiziksel fikir şudur: bir gazı yeterince uzun süre kendi haline bırakırsanız, çarpışmalar onu bu denge durumuna yönlendirir. Dolayısıyla \(f^{eq}\), \(f\)’nin ulaşmaya çalıştığı yeri temsil eder. Hatırlamak icin \(f^{eq}\) formülünü tekrar verelim,
\[f^{eq} = \left(\frac{m}{2\pi k_B T}\right)^{3/2} \exp\left(-\frac{m|c-u|^2}{2k_BT}\right)\]
Birçok açıdan BGK modeli, sistemin durumunu fark terimi \((f^{eq} - f)\) aracılığıyla “algılar”. \(f^{eq}\) doğrudan yerel, gerçek zamanlı makroskopik özelliklerden (\(\rho\) ve \(u\)) hesaplandığından, sıvının tam anlamıyla oraya meyillendirilmiş olma durumunda bulunması gereken matematiksel durumu temsil eder.
Sıvı zaten denge durumundaysa \(f = f^{eq}\), yani \(\Delta f = 0\). Model, hiçbir düzeltmeye gerek olmadığını algılar.
\(f\) ile \(f^{eq}\) birbirinden uzaklaşır ve \(\Delta f\) büyürse, bu çarpışmaların olduğu anlamına gelir; bu fark, bir kontrol sistemindeki hata sinyali gibi algılanır moleküler sınır dışına ne kadar çıktığını tam olarak ölçer.
Sapma bu çıkarma işlemiyle algılandıktan sonra, BGK operatörü bu değeri sistemi değiştirmek için hemen kullanır:
\[\Omega = \frac{1}{\tau}(f^{eq} - f)\]
Bu hata sinyalini \(\frac{1}{\tau}\) meyillendirme / gevşeme faktörüyle çarpar ve pasif bir ölçümü aktif bir geri yükleyici kuvvete dönüştürür.
Belirli bir hızda hareket eden çok fazla molekül varsa (\(f > f^{eq}\)), terim negatif olur ve çarpışma adımı o yöndeki mevcudiyeti azaltır.
Çok az molekül varsa (\(f < f^{eq}\)), terim pozitif olur ve çarpışma adımı o yöndeki mevcudu artırır.
Değişiklik her zaman sapma ile doğrudan orantılıdır. Bir düğüm doğal denge durumundan ne kadar uzaksa, onu yeniden dengeye sokmak için değiştirme adımı o kadar agresif hale gelir. Bu, kendi kendini düzenleyen matematiksel bir motordur: yüksek bozulma, büyük bir düzeltici çarpışma tepkisini tetiklerken, sakin ve dengelenmiş bir akış tamamen değişmeden geçer.
Bir not olarak belirtmek gerekir ki yukarıda açıklanan şema özünde doğrusal bir meyillendirme / gevşeme modelidir; Newton’un soğuma yasası \(dT/dt = -(T - T_\infty)/\tau\) ile aynı matematiksel yapıya sahiptir.
Denge dağılımını daha kolay hesaplanabilir hale getirmek için üzerinde bazı işlemler yapmamız gerekiyor. Gaussian \(\exp(-|c|^2/2RT)\), ayrık bir ızgara için çeşitli nedenlerle sorunludur:
Sürekli \(c\) için tanımlanmıştır
Hiçbir zaman tam olarak sıfıra eşit olmadığından sonlu sayıda yön bağlamında budanamaz (truncate).
Simülasyonda tekrar tekrar hesaplanması pahalıdır
Bunu aşağıdaki adımlarla çözebiliriz, \(f^{eq}\) denklemini biraz masajlayarak onu farklı bir forma çevirelim [2, sf. 37].
\[ f^{eq} = \frac{\rho}{(2\pi RT)^{D/2}} \exp\left(-\frac{(c-u)^2}{2RT}\right) \]
Üsteldeki kareyi açalım,
\[ = \frac{\rho}{(2\pi RT)^{D/2}} \exp\left(-\frac{c \cdot c - 2c \cdot u + u \cdot u}{2RT}\right) \]
Üstteki \(c-u\) kullanımı hızı iki bileşene ayırıyor. Bu bilisenlerden birisi \(u\) ile belirtilen genel / global / toptan (bulk) hızdır, diğeri mikro seviyedeki \(c\) hızıdır. 9 tane yön altında incelenen hız \(c\) olacaktır, ve bu hız makro seviyedeki \(u\)’dan arta kalan dinamik olarak incelenir, nihai dağılım formülüne verilen \(c-u\) olur.
Üstel \(\exp\)’yi iki blok halinde alalım,
\[ = \frac{\rho}{(2\pi RT)^{D/2}} \exp\left(-\frac{c \cdot c}{2RT}\right) \exp\left(\frac{2c \cdot u - u \cdot u}{2RT}\right) \tag{1} \]
Üstel fonksiyon bir Taylor serisi kullanılarak açılabilir, \(\exp\) için standart açılımı hatırlarsak,
\[\exp(x) = 1 + x + \frac{x^2}{2!} + \frac{x^3}{3!} + \cdots \tag{2}\]
Taylor açılımını ikinci üstel üzerinde uygulayalalım,
\[ f^{eq} = \frac{\rho}{(2\pi RT)^{D/2}} \exp\left(-\frac{c \cdot c}{2RT}\right) \left( 1 - \frac{-2c \cdot u + u \cdot u}{2RT} + \frac{(-2c \cdot u + u \cdot u)^2}{4R^2T^2} + \cdots \right) \tag{3} \]
burada parantez içindeki ikinci terim (2)’deki \(x\) terimidir, üçüncü terim \(x^2/2!\) terimidir; \(O(u^3)\) terimleri atılır ve \((-2c \cdot u + u \cdot u)^2 \approx 4(c \cdot u)^2\) sadeleştirmesi yapılır (çünkü kare içindeki \(u \cdot u\) terimi zaten \(O(u^2)\) mertebesinde olduğundan bütün ifadeyi \(O(u^4)\) yapar), bu da (3)’ten (4)’e geçişi sağlar. Devam edelim, ıkinci üstelin Taylor açılımı yapılarak \(O(u^3)\) terimleri atıldığında:
\[ f^{eq} = \frac{\rho}{(2\pi RT)^{D/2}} \exp\left(-\frac{c \cdot c}{2RT}\right) \left(1 + \frac{2c \cdot u - u \cdot u}{2RT} + \frac{(c \cdot u)^2}{2R^2T^2}\right) \tag{4} \]
\(W(c) = \frac{1}{(2\pi RT)^{D/2}} \exp\!\left(-\frac{c \cdot c}{2RT}\right)\) ve \(RT = c_s^2\) yerine koyarak:
\[ f^{eq} = \rho W(c) \left(1 + \frac{2c \cdot u - u \cdot u}{2c_s^2} + \frac{(c \cdot u)^2}{2c_s^4}\right) \]
\(W(c) \to w_i\) ızgara yönü \(i\) boyunca ayrıklaştırılarak:
\[ f^{eq}_i = \rho w_i \left(1 + \frac{2c_i \cdot u - u \cdot u}{2c_s^2} + \frac{(c_i \cdot u)^2}{2c_s^4}\right) + O(u^2) \tag{5} \]
Izgara Boltzmann Yöntemi’nde “ızgara yönleri”, sanal parçacıkların hareket etmesine ve çarpışmasına izin verilen sabit, ayrık yolları temsil eder. Sürekli fonksiyon \(f(x, c, t)\), sonsuz hız yelpazesi, sonsuz küçük aralıklarda parçacık yoğunluğunu izler. LBM bunu hız uzayını \(i\) alt indisiyle gösterilen sonlu bir vektörler kümesine ayrıştırarak basitleştirir. Bu noktayı vurgulamak iyi olur, LBM ile \(f\) üzerinden bir “yönsel dağılıma” bakıyoruz, 9 yöndeki vektörler üzerinde moleküler dinamik bağlamında tekil parçacık hareketlerini takip etmiyoruz.
Sonuç olarak, sürekli \(f\), bir ayrık dağılım fonksiyonları kümesine, \(f_i\)’ye bölünür; burada her \(f_i(x, t)\), \(x\) konumundaki \(t\) zamanında \(i\) kafes yönünde hareket eden parçacıkların yoğunluğunu temsil eder.
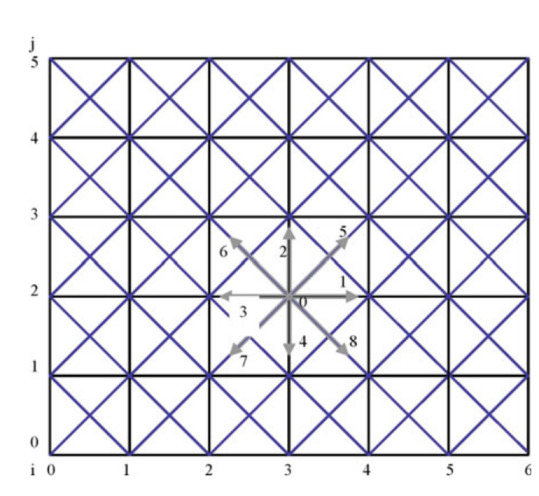
Örneğin, ilk figürdeki yaygın \(D2Q9\) modelinde (2 boyut, 9 hız), \(i\) indisi 0’dan 8’e kadar uzanır. Burada \(f_0\) durağan parçacıkları temsil eder, \(f_1\)’den \(f_4\)’e kadar olanlar \(c\) hızında en yakın komşulara yatay ve dikey yönde hareket eden parçacıkları temsil eder ve \(f_5\)’ten \(f_8\)’e kadar olanlar \(\sqrt{2}c\) hızında bir sonraki en yakın komşulara çapraz hareketleri izler. Bu ayrıştırma, karmaşık bir diferansiyel denklemi son derece verimli, yerelleştirilmiş cebirsel hesaplamalara dönüştüren şeydir.
Devam edelim, \(f^{eq}_i\), Taylor açılımlı Maxwell-Boltzmann (3.4) ile \(\rho\) ve \(u\) kullanılarak hesaplanır:
\[ f^{eq}_i = w_i \rho \left(1 + \frac{c_i \cdot u}{c_s^2} + \frac{(c_i \cdot u)^2}{2c_s^4} - \frac{u \cdot u}{2c_s^2}\right) \tag{9} \]
Yani Taylor açılımı, üsteli ayrık bir ızgara üzerinde ele alınabilir olan \(c \cdot u\) cinsinden bir polinomla değiştirdi. Ardından yapılan iki yerine koyma işlemi de iyi oldu,
\(W(c) = \exp(-c \cdot c / 2RT)(2\pi RT)^{-D/2}\), Gaussian’ı bir ağırlığa absorbe eder — ve bu ağırlık yalnızca \(c\)’nin büyüklüğüne bağlı olduğundan, her ayrık ızgara yönü \(i\) için bir kez hesaplanan sabit bir \(w_i\) sabitine dönüşür
\(RT = c_s^2\), termodinamiği ızgara ses hızına bağlar
Dolayısıyla (5)’te ayrıklaştırmanın ardından \(f^{eq}_i\), sabit katsayıları \(w_i\), \(c_i\), \(c_s\) olan — hepsi önceden hesaplanabilir — \(u\) cinsinden yalnızca bir polinomdur. LBM’yi hesapsal açıdan bu kadar çekici yapan da budur.
\(O(u^2)\) budaması aynı zamanda yaklaşımın sınırlarını da bize söyler: üstte gösterilen LBM yaklaşıksallığı bir düşük Mach sayısı yaklaşımıdır. \(|u|/c_s\)’nin küçük olmadığı yüksek hızlı akışlar için daha yüksek mertebeden terimler gerekecektir.
Şimdi bir Taylor açılımına daha ihtiyaç duyacağız. Bu tekniği \(f(..)\) için kullanmak istiyoruz.
Çok boyutlu durumda \(f(x_1, x_2, \ldots)\)’yi \(a_1, a_2, \ldots\) etrafında açmak için şu genel açılımı hatırlayabiliriz,
\[ f(x_1, x_2, \ldots) \approx f(a_1, a_2, \ldots) + \frac{\partial f}{\partial x_1}(x_1 - a_1) + \frac{\partial f}{\partial x_2}(x_2 - a_2) + \cdots \]
Bizim uygulamamız için küçük fark \(x\), \(t\) etrafında açılım yapmak istememizdir; bir sonraki durum \(x + c_i \Delta t\) ve \(t + \Delta t\)’dir. Bu nedenle yukarıda görülen \(x_1 - a_1\) ve \(x_2 - a_2\) türü ifadeleri şu şekilde yeniden belirtmemiz gerekir:
Artık Taylor açılımı şu hale gelir:
\[ f_i(x + c_i \Delta t, t + \Delta t) \approx f_i(x, t) + \frac{\partial f_i}{\partial x} c_i \Delta t + \frac{\partial f_i}{\partial t} \Delta t \tag{6} \]
Ya da \(\nabla\) gösterimini kullanarak şunu da söyleyebiliriz:
\[f_i(x + c_i \Delta t, t + \Delta t) = f_i(x, t) + \frac{\partial f_i}{\partial t} \Delta t + \nabla f_i \cdot c_i \Delta t + O(\Delta t^2)\]
Her iki taraftan \(f_i(x, t)\)’yi çıkarır ve tüm denklemi \(\Delta t\)’ye böleriz:
\[\frac{f_i(x + c_i \Delta t, t + \Delta t) - f_i(x, t)}{\Delta t} = \frac{\partial f_i}{\partial t} + c_i \cdot \nabla f_i + O(\Delta t)\]
\(\Delta t \to 0\) limitini alırsak, yüksek mertebeden \(O(\Delta t)\) terimleri yok olur. Geriye şu kalır:
\[= \frac{\partial f_i}{\partial t} + c_i \cdot \nabla f_i\]
Bu form tanıdık geliyor mu? Elbette! Bu, daha önce türettiğimiz Boltzmann taşınım denkleminin kendisidir ve bunun neye eşit olduğunu biliyoruz:
\[\frac{\partial f_i}{\partial t} + c_i \cdot \nabla f_i = \frac{1}{\tau}(f^{eq}_i - f_i) \tag{7}\]
Dolayısıyla (6)’daki sol tarafın ayrıklaştırılması bize şunu kazandırdı, onun Boltzmann taşınım denklemine eşit olduğunu gördük; dolayısıyla (7)’nın sağ tarafı da doğru olacaktır. Çarpışma matematiğini hesaplamak için bu gerçeği kullanabiliriz: her \(i\) yönü için düğümün mevcut \(\rho\) ve \(u\) değerlerini polinom formülüne koyarak \(f^{eq}_i\) denge değerini hesaplarız, \(f_i\)’den \(f^{eq}_i\)’yi çıkarırız, bunu \(\frac{\Delta t}{\tau}\) (gevşeme faktörü) ile çarparız ve elde edilen sonucu orijinal \(f_i\)’den çıkarırız.
\(f_i\) güncelleme formülünü daha detaylı görmek için ayrıksallaştırmaya şu şekilde de yaklaşabilirdik [2, sf. 57]. \(t + \Delta t\) noktasında, (7)’nın sol tarafı şöyle ayrıksallaştırılır,
\[ \frac{f_k(x, t+\Delta t) - f_k(x, t)}{\Delta t} + c_k \cdot \frac{f_k(x+\Delta x, t+\Delta t) - f_k(x, t+\Delta t)}{\Delta x} = -\frac{1}{\tau}(f_k - f_k^{eq}) \tag{8} \]
\(\Delta x = c_k \Delta t\) oldugu icin
\[ = \frac{\cancel{f_k(x, t+\Delta t)} - f_k(x, t)}{\Delta t} + \cancel{c_k} \cdot \frac{f_k(x+\Delta x, t+\Delta t) - \cancel{f_k(x, t+\Delta t)}}{\cancel{c_k} \Delta t} \]
Geri kalanları toparlarsak ve (8)’ın sağ tarafını geri getirip \(\Delta t\)’yi oraya geçirirsek,
\[ f_k(x+\Delta x, t+\Delta t) - f_k(x, t) = -\frac{\Delta t}{\tau}(f_k - f_k^{eq}) \]
Şu eşitliği kullanalım şimdi \(\omega = \Delta t / \tau\),
\[ f_k(x+\Delta x, t+\Delta t) = \omega f_k^{eq}(x, t) - \omega f_k(x, t) + f_k(x, t) \]
Ya da
\[ f_k(x+\Delta x, t+\Delta t) = (1-\omega) f_k(x, t) + \omega f_k^{eq}(x, t) \]
Üstteki nihai güncelleme formülüdür, bunu koda bakarken göreceğiz. Sağ tarafı şöyle de gösterebilirdik,
\[f_i(x + c_i \Delta t, t + \Delta t) = f^*_i(x, t)\]
Algoritmik açıdan bu saf bir bellek kopyalama işlemidir. Ardından \(i\) yönü için \(c_i\) hız vektörüne bakılır, az önce \(x\) düğümünde hesaplanan çarpışma sonrası \(f^*_i\) değeri alınır ve bir sonraki zaman adımı için tam olarak \(x + c_i \Delta t\) konumundaki komşu düğümde \(i\) yönüne karşılık gelen bellek yuvasına yazılır.
Altta yazacağımız simülasyonda kapak güdümlü alan / oyuk (lid-driven cavity) içindeki sıvı akış problemini çözmeye uğraşacağız. Problem tanımı şöyle: Bir oyuğun üstündeki kapak sabit bir hızda sürekli soldan sağa gidiyor. Bu gidiş sırasında kapak alttaki su ile temasta olduğu için temas edilen en üst seviyedeki suyu soldan sağa doğru itecektir. Oyuk içindeki sağ, sol ve en alt kısmındaki duvarlar sabittir, tabii hareket halindeki su onlara çarpınca geri sekme olur, bu sekmenin diğer su molekülleri ile olan etkileşimi de hesaplanmalıdır, tüm bu mekaniğin simulasyonda gösterilmesi gerekir.
Izgara, Global Akış
Kodlama için kullanılan ızgara D2Q9 ızgarası olacak, iki boyuttayız, ve hareketsizlik dahil olmak üzere 9 tane yön var. Bu yönleri ve onların numaralandırılmasını alttaki şekilde görüyoruz.
Sabit hızda kapak hareketin altındaki suya yapacağı sabit etkiyi sisteme dahil etmenin en rahat yolu \(u\) üzerinden olacaktır. Daha önce \(u\) değişkeninin global hareketi temsil ettiğini söylemiştik. O zaman, mesela sisteme etki edecek bir “rüzgar” ya da bu örnekteki gibi sabit hızdaki bir sıvı hareketini \(u\) ile yaparız. Simulasyon sırasında \(u\)’yu temsil eden matrisin en üst satırına bu sabit hız enjekte edilebilir.
Sağ, sol, alt duvarları sabittir, bu duvarlara dokunan \(u\) noktalarında hız sıfırlanmalıdır, ayrıca orada momentumun her zaman sıfır olmalısı da gerekir, buna sıvı mekaniğinde kaymamazlık koşulu / kayma-yok (no-slip condition) ismi veriliyor. Bu kaymazlık koşulunun momentum kısmını elde etmek için de çarpışma sonrası yönsel yoğunluğu (D2Q9’daki 9 tane yönden bahsediyoruz) tamamen tersine çevirmek gerekir. Dikkat: Pong oyunu usulü topun duvardan bir açıyla sekmesinden bahsetmiyoruz, alt sola doğru olan gidişi tam tersine, üst sağa çevirmekten bahsediyoruz (Pong olsaydı “sekme” sonrası gidiş sağ alta doğru olurdu).
Bu arada belirtelim hareket etmeyen duvara temas eden ince sıvı tabakasının hızının sıfırlanması gerçekçi bir seçimdir, duvarlar pürüzsüz değildir, pek çok girintisi çıkıntısı olan yapılardır, bu noktalara temas eden sıvı moleküllerinin oraya yapıştığı deneylerde saptanmıştır.
Hız yönünün tersini çevrilmesi gerekliliğini momentum muhafazasından türetebiliriz. Bir duvar düğümünde \(f_i\)’leri gelen ve giden popülasyonlara ayıralım.
\(f_i^+\) — \(\mathbf{e}_i\)’sı duvardan uzaklaşan yoğunluk
\(f_i^-\) — \(\mathbf{e}_i\)’sı duvara doğru işaret eden yoğunluk
ki \(\mathbf{e}_i\) vektörleri LBM ızgara yapısının tanımladığı yönlerdir. Akış sonrasında, \(f_i^-\) molekülleri duvara henüz ulaşmıştır. \(f_i^+\) yoğunluğu ise bilinmeyendir — bunların sınır koşulu tarafından belirlenmesi gerekir. Kayma-yok kısıtlaması şunu söyler:
\[\sum_{i^+} f_i^+ \mathbf{e}_i^+ + \sum_{i^-} f_i^- \mathbf{e}_i^- = 0\]
Üstteki formül alttakinin açılmış hali, çünkü LBM’de \(\mathbf{x}\) düğümündeki momentum şöyledir:
\[\rho \mathbf{u}(\mathbf{x}, t) = \sum_i f_i(\mathbf{x}, t)\, \mathbf{e}_i\]
Devam edelim, sıfıra eşit olmayı sağlamanın en basit yolu, her gelen \(i^-\) yönü için şunu ayarlamaktır:
\[f_{\bar{i}}^+ = f_i^-\]
burada \(\bar{i}\), \(i\)’nin karşı yönüdür, yani \(\mathbf{e}_{\bar{i}} = -\mathbf{e}_i\). O halde:
\[\sum_{i^-} f_{\bar{i}}^+ \mathbf{e}_{\bar{i}}^+ + \sum_{i^-} f_i^- \mathbf{e}_i^- = \sum_{i^-} f_i^- (-\mathbf{e}_i^-) + \sum_{i^-} f_i^- \mathbf{e}_i^- = 0 \]
Her çift tam olarak birbirini iptal eder. Bu geri-sekme kuralıdır, momentum toplamının sıfır olması talebi doğrultusunda doğrudan elde edilir.
Yayılım (Streaming)
LBM yayılım mantığını olabildiğince basitleştirir. Mevcut dağılımı
önceden tanımlı hareket yönlerine sadece bir ızgara hücresi üzerinden
kopyalar. Kopyalama için np.roll kullanılıyor, bu çağrının
bazı örnekleri aşağıda,
A = np.array([[0,0,0],[0,1,1],[0,0,0]])
print (A)
A = np.roll(np.roll(A[:, :], -1, axis=0), 0, axis=1)
print (A)
A = np.roll(np.roll(A[:, :], 0, axis=0), 1, axis=1)
print (A)[[0 0 0]
[0 1 1]
[0 0 0]]
[[0 1 1]
[0 0 0]
[0 0 0]]
[[1 0 1]
[0 0 0]
[0 0 0]]Bu kopyalama tekniği matrisin sınırlarından taşan değerleri matrisin diğer ucuna döndürür / kopyalar.
Bir soru akla gelebilir, eğer yayılım evresinde her hücre yanındakine kopyalıyorsa, o zaman genel akış nasıl ortaya çıkıyor? Çünkü normal durumda diyelim \(\Omega = 0\), A yanındaki B’ye kopyalar, sonra B geri A’ya kopyalar. Değişim nerede ortaya çıkıyor? Bu yerine bir gözlem: eğer hiçbir çarpışma olmasaydı (ki çarpışma miktarı denge dağılımına olan uzaklıkla doğru orantılı) o zaman hakikaten giden moleküller gelenler ile aynı olacaktı, yani hiçbir şey değişmeyecekti. O zaman hiçbir şey yapmamak için gereğinden fazla kod işletmiş olurduk. Fakat birazdan göreceğiz ki çarpışma olduğu zaman LBM’in gerçek avantajları ortaya çıkıyor.
Kod altta görülebilir, [2]’nin Matlab kodları baz alınmıştır.
nx, ny = 101, 101
f = np.zeros((nx, ny, 9))
ux = np.zeros((nx, ny))
uy = np.zeros((nx, ny))
rho = np.ones((nx, ny))
w = np.array([1/9, 1/9, 1/9, 1/9, 1/36, 1/36, 1/36, 1/36, 4/9])
cx = np.array([1, 0, -1, 0, 1, -1, -1, 1, 0])
cy = np.array([0, 1, 0, -1, 1, 1, -1, -1, 0])
xl, yl = 1.0, 1.0
dx = xl / (nx - 1)
dy = yl / (ny - 1)
x = np.linspace(0, xl, nx)
y = np.linspace(0, yl, ny)
uo = 0.10
alpha = 0.1
Re = uo * (ny - 1) / alpha
omega = 1.0 / (3.0 * alpha + 0.5)
tol = 1e-4
error = 10.0
erso = 0.0
count = 0
# Kapak hizi
ux[:, -1] = uo
def collision(f, u, v, rho):
t1 = u**2 + v**2 # (nx, ny)
# t2[k] = ux*cx[k] + uy*cy[k] her k yonu icin
t2 = (ux[:, :, np.newaxis] * cx
+ uy[:, :, np.newaxis] * cy) # (nx, ny, 9)
feq = (rho[:, :, np.newaxis] * w
* (1.0 + 3.0*t2 + 4.5*t2**2
- 1.5*t1[:, :, np.newaxis]))
f = (1.0 - omega) * f + omega * feq
return f
def stream(f):
# Alttaki MATLAB circshift([+1,0]) cagrisinin benzeridir
# MATLAB: circshift(A, [r,c]) tum satirlari r kadar, kolonlari c kadar kaydirir
shifts = [(1,0),(0,1),(-1,0),(0,-1),(1,1),(-1,1),(-1,-1),(1,-1)]
for k, (sr, sc) in enumerate(shifts):
f[:, :, k] = np.roll(np.roll(f[:, :, k], sr, axis=0), sc, axis=1)
return f
def boundary(f, uo):
# --- sol duvar
f[0, :, 0] = f[0, :, 2]
f[0, :, 4] = f[0, :, 6]
f[0, :, 7] = f[0, :, 5]
# --- sag duvar
f[-1, :, 2] = f[-1, :, 0]
f[-1, :, 6] = f[-1, :, 4]
f[-1, :, 5] = f[-1, :, 7]
# --- alt duvar
f[:, 0, 1] = f[:, 0, 3]
f[:, 0, 4] = f[:, 0, 6]
f[:, 0, 5] = f[:, 0, 7]
# Üst sınır (top boundary) hareket eden kapak (Zou/He usulü)
# hesap iç x düğümleri üzerinden vektorize edilmiştir (index 1..nx-2)
i = slice(1, nx - 1)
rhon = (f[i, -1, 8] + f[i, -1, 0] + f[i, -1, 2]
+ 2.0 * (f[i, -1, 1] + f[i, -1, 5] + f[i, -1, 4]))
f[i, -1, 3] = f[i, -1, 1]
f[i, -1, 7] = f[i, -1, 5] + rhon * uo / 6.0
f[i, -1, 6] = f[i, -1, 4] - rhon * uo / 6.0
return f
def ruv(f):
rho = f.sum(axis=2)
# Üst satırdaki yoğunluğu düzelt (hareket eden kapak için denge
# dışı dışdeğerleme -extrapolation- yap)
rho[:, -1] = (f[:, -1, 8] + f[:, -1, 0] + f[:, -1, 2]
+ 2.0 * (f[:, -1, 1] + f[:, -1, 5] + f[:, -1, 4]))
ux = (f[:, :, 0] + f[:, :, 4] + f[:, :, 7]
- f[:, :, 2] - f[:, :, 5] - f[:, :, 6]) / rho
uy = (f[:, :, 1] + f[:, :, 4] + f[:, :, 5]
- f[:, :, 3] - f[:, :, 6] - f[:, :, 7]) / rho
return rho, ux, uy
while error > tol:
f = collision(f, ux, uy, rho)
f = stream(f)
f = boundary(f, uo)
rho, ux, uy = ruv(f)
count += 1
ers = np.sum(ux**2 + uy**2)
error = abs(ers - erso)
erso = ers
# Post-processing (mirrors result.m)
mid_x = (nx - 1) // 2
mid_y = (ny - 1) // 2
um = ux[mid_x, :] / uo # centreline u-velocity vs y
vm = uy[:, mid_y] / uo # centreline v-velocity vs x
fig, ax = plt.subplots()
X, Y = np.meshgrid(x, y)
speed = np.sqrt(ux**2 + uy**2)
strm = ax.streamplot(X, Y, ux.T, uy.T, color=speed.T, cmap='viridis', linewidth=1.5)
fig.colorbar(strm.lines, label=u'Hız Büyüklüğü')
ax.set_xlabel("X"); ax.set_ylabel("Y")
fig.savefig("compscieng_bpp43lbm_02.jpg", dpi=150)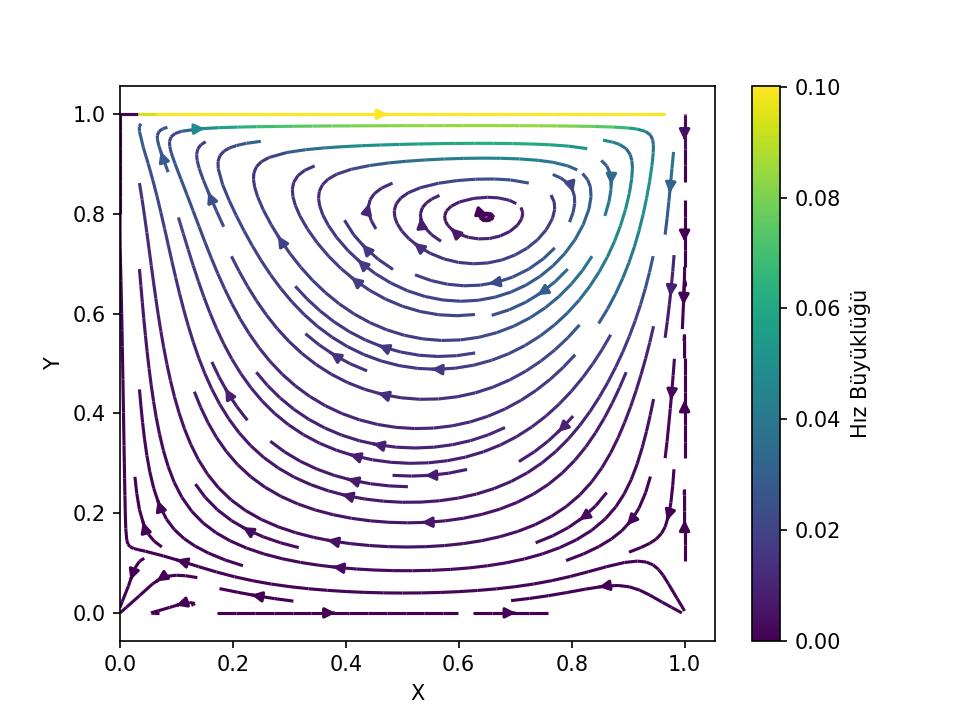
Çarpışma
Yayılım mekanik bir kopyalama işlemidir, mevcut dağılımı önceden belirlenmiş yönde kopyalar. Çarpışma her yönde ne kadar kütlenin olacağını ayarlar, bunu mevcut (yönsel) dağılımı denge dağılımı \(f^{eq}\)’ya doğru çekerek yapar.
Diyelim ki fiziksel akışta sağa doğru bir ivme var, çarpışma mantığı bu noktada sol yöne doğru bakan kanallardan kütle alır (\(k=2,5,6\)), ve bu kütleyi sağ yöne doğru bakan kanallara verir (\(k=0,4,7\)). Böylece bir sonraki yayılım adımında daha fazla kütle sağa doğru gitmiş olur.
Bu değişim tabii ki momentum hesabı ruv(f) üzerinden
global hız \(u\)’yu da etkiler. Orada
yapılan hesap şöyleydi,
\[ u = \frac{1}{\rho} \sum_{k} f_k c_k \]
Görüldüğü gibi \(c_k\)’lerin önceden tanımlı olmasına rağmen değisen \(f\)’ler toptan hızda etki yaratıyor.
Dış Etkinin Yayılması
Üstteki sonuçta kapak-güdümlü oyuk probleminin gerçekçi bir simülasyonunu görüyoruz. Sadece en üst, ince bir tabakaya uygulanan dış hareket (kapak hareketi sebebiyle, aerodinamikte bu bir rüzgar olabilirdi) alt bölgelere nüfuz etti. Simülasyonun ardından nasıl ilerlediğini tahmin edebiliriz, en üst tabakadaki soldan sağa hareket gide gide sağ duvara çarpacaktı, oradan sekerek aşağı doğru bir hareket yaratacaktı, bunun yer değimine sebep olduğu su kütleleri de yavaş yavaş alt bölgelere doğru giderek üstteki hareketi ortaya çıkaracaktı.
Fakat duvara çarpma olmadan önce bile en üstteki ince su hareketinin alt tabakalara yayılması mümkündür (tabii bu da fiziksel sezgiye uygundur). Bu durumun nasıl ortaya çıkacağına bakalım.
Kod içinde sabit hareket en üst noktaya enjekte ediliyor,
ux[:, -1] = üo, ki üo = 0.10, ve
-1 en son indis değerini temsil eder, x-y grafiğinde y
bağlamında en üst nokta tabii ki oyuk kapağı burada.
Kütle yer değişimi, hareket olması için çarpışma olması gerektiğinden bahsettik, bu da denge bozulmasına bağlı, yani \(f^{eq}\) hesabına, daha detaya inersek, her yöndeki \(f_i^{eq}\) hesabına. Sıvı kütlelerinin alt yönlere doğru gitmesi için en azından sağ alt yöne doğru bir hareket olmalı. En üstteki global hız bu yöndeki dengeyi nasıl etkiler acaba? (9) formülüne bakarsak ne olacağını anlayabiliriz. Alt sağ yönü için \(k=7\), onun vektör yönü \(c_7 = (1,-1)\). O zaman (9) denge formülündeki noktasal çarpımı hesaplarsak,
\[ \mathbf{u} = \begin{pmatrix} u_x \\ u_y \end{pmatrix} = \begin{pmatrix} +0.10 \\ 0.00 \end{pmatrix} \quad \mathbf{c}_7 = \begin{pmatrix} c_{7x} \\ c_{7y} \end{pmatrix} = \begin{pmatrix} +1 \\ -1 \end{pmatrix} \]
\[ \mathbf{c}_7 \cdot \mathbf{u} = (c_{7x} \cdot u_x) + (c_{7y} \cdot u_y) \]
\[ \mathbf{c}_7 \cdot \mathbf{u} = \left( (+1) \cdot (+0.10) \right) + \left( (-1) \cdot (0.00) \right) \]
Bu demektir ki sağ alt (köşegen) yönüne doğru pozitif birikme olmuştur, ve LBM mekaniği bu yöne doğru yoğunluk kaydırması yaratacaktır! Böylece su kütleleri yavaş yavaş aşağı doğru yayılmaya başlarlar.
Kodlar
boundary.m, collision.m, main.m, result.m, ruv.m, stream.m
Kaynaklar
[1] Bayramli, Fizik - Sıvı ve Gaz Mekaniği - 2
[2] Mohamad, Lattice Boltzmann Method Fundamentals and Engineering Applications with Computer Codes
[3] Satoh, Introduction to Practice of Molecular Simulation