Denklem [1],
\[ \frac{\partial^2 y}{\partial x^2} = \frac{1}{c^2}\frac{\partial^2 y}{\partial t^2} \]
Denkleme yakından bakarsak onun bir kısmı türevsel denklem (PDE) olduğunu görürüz. İki tane bağımsız değişken temel alınıyor, \(x,t\). Ayrıca denklem 2. derece, çünkü ikinci türevi içeriyor. Bu bilgiler denklemi çözmek için önemli [2].
Çözümde bir başlangıç şartı gerekli çünkü diferansiyel denklemleri “entegre ederken’’ daha doğrusu ileri doğru geçen zamanda hesaplarken bir başlangıç noktası gerekiyor, bunun için bir teli kaldırıp (geçici bir süre üçgen haline getirip) oradan bıraktığımızı düşünebiliriz, ki bu üçgen şekli alttaki gibi modellenebilir,
\[ y(x,t=0)=\begin{cases} 1.25 x/L , &x\leq 0.8 L ,\\ (5-5x/L), &x> 0.8 L, \end{cases} \]
İkinci bir başlangıç şartı daha lazım, 2. derece başlangıç şartı bu. Teli, ipi gerip üçgen yaptım ama sonra durup tekrar bıraktım, bu da bir başlangıç şartı, durağan durumdan başlama şartı.
\[ \frac{\partial y} {\partial t}(x,t=0) =0 \]
Çözüme bu şartlarla başlayabilirdik ama baştaki problem tanımını hatırlarsak ek bazı şartlar daha koymuştuk, bu şartlar, kısıtlamalar her an için geçerli, ipler iki ucundan (hareket etmeyen) duvarlara bağlı.
\[ y(0,t) \equiv 0, \quad y(L,t) \equiv 0 \]
[analitik çözüm atlandı]
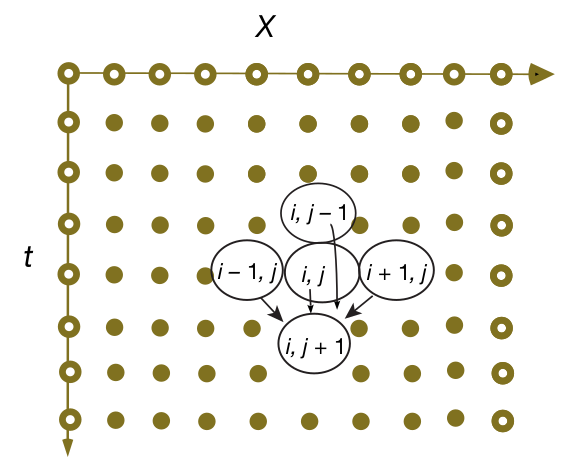
Yaklaşıksal hesap için \(x,t\) eksenleri düşünebiliriz, ve bu eksenlerde sadece belli noktalardaki hesaplar yapılacak, \(x\) için aralıklar \(\Delta x\) genişliğinde, \(t\) için \(\Delta t\) genişliğinde, aralık büyüklüğünü biz tanımlayacağız. Yani hesap noktaları \(i=1,2,3,...\) için \(i \Delta t\)’de, \(x\) için \(j=1,2,..\) ile \(j \Delta t\)’de.
Yaklaşıksallıkta bir diğer kullanılacak teknik merkezi farklılıklar, burada \(x\) için sola/sağa, \(t\) için yukarı/aşağı olacak şekilde iki Taylor açılımı yapıyoruz,
\[ y(x +\Delta x, t) = y(x,t) + \frac{\partial U}{\partial x}\Delta x + \frac{1}{2} \frac{\partial^2 U}{\partial x^2}(\Delta x)^2 + \cdots \]
\[ y(x -\Delta x, t) = y(x,t) - \frac{\partial U}{\partial x} \Delta x + \frac{1} {2} \frac{\partial^2 U}{\partial x^2} (\Delta x)^2 - \cdots \]
\[ y(x, y +\Delta t) = y(x,t) + \frac{\partial U}{\partial t}\Delta y + \frac{1}{2} \frac{\partial^2 U}{\partial t^2}(\Delta t)^2 + \cdots \]
\[ y(x, y -\Delta t) = y(x,t) - \frac{\partial U}{\partial t} \Delta t + \frac{1} {2} \frac{\partial^2 U}{\partial t^2} (\Delta t)^2 - \cdots \]
Noktalı yerlerdeki terimleri yok sayıyoruz (2. derece yaklaşıklama yapmış olduk yani, bu önemli, yaklaşık temsilin kuvvetini gösteriyor bir anlamda), sonra her değişkenin iki açılımını birbiri ile topluyoruz. Toplama sonrası tek sayı terimlerinin iptal olduğunu görürüz, ve kalanlar,
\[ \frac{\partial^2 y(x,t)}{\partial x^2} \simeq \frac{y(x+\Delta x,t)+y(x-\Delta x,t)-2 y(x,t)}{(\Delta x)^2} \]
\[ \frac{\partial^2 y(x,t)}{\partial t^2} \simeq \frac{y(x,t+\Delta t) +y(x, y-\Delta t)-2 y(x,t)}{(\Delta t)^2} \]
olacaktır. İndisler üzerinden belirtirsek,
\[ \frac{\partial^2 y }{\partial t^2} \simeq \frac{y_{i,j+1}+y_{i,j-1}-2 y_{i,j}}{(\Delta t)^2}, \quad \frac{\partial^2 y}{\partial x^2} \simeq \frac{y_{i+1,j}+y_{i-1,j}-2 y_{i,j}} {(\Delta x)^2}. \]
Üstteki formülleri dalga denklemindeki yerlerine koyarsak,
\[ \frac{y_{i,j+1}+y_{i,j-1}-2 y_{i,j}} {c^2 (\Delta t)^2} = \frac{y_{i+1,j}+y_{i-1,j}-2 y_{i,j}} {(\Delta x)^2} \tag{2} \]
Tabii dikkat edersek geçmiş \(j-1\) ve gelecek \(j+1\) birbirine karışmış durumda, bize lazım olan geleceğin hesabının eşitliğin sol tarafında olması geri kalan her şey sağda olacak şekilde tekrar düzenlersek,
\[ y_{i,j+1} = 2 y_{i,j}-y_{i,j-1}+ \frac{c^2 } {c'^{2}} \left [ y_{i+1,j}+y_{i-1,j}-2 y_{i,j}\right], \quad c' { = } \frac {\Delta x}{\Delta t} \tag{1} \]
Hesap için üstteki resmi hatırlayalım, \(i,j+1\) hücresine dört diğer hücreden ok çizilmiş, aslında bu oklar üstteki formülün hesabını anlatıyor, o anki \(t\) zamanından üç hesap ve geçmişten \(i,j-1\) hesabına bakarak gelecekteki değeri hesaplıyoruz. Bu hesaplama çok verimli olacak çünkü herhangi bir anda hafızada tutulması gereken \(y(i,j)\) haricinde sadece üç tane değer var.
Son bir problem başlangıç anı ile alakalı, resimdeki bilinmesi gereken o üç hücrenin başlangıç \(j=1\) anında olduğunu düşünürsek, ve \(j=2\)’yi hesaplamamız gerekiyor, eksi zamana doğru bir gidişat lazım, yani \(j=-1\) zamanı. Başlangıç bilgisi \(j=1\) var, ama \(j=-1\) yok. Buradaki bilgiyi nasıl alacağız?
Denklemsel olarak bir ek koşul daha ekleyerek, ilk başta hem teli çekip üçgen haline getirmiştik, bir de başlangıç anında telin hızı sıfırdır diyeceğiz. Bu mantıksız değil, tel çekildi, tutuluyor.. hareket yok. Denklem olarak \(\partial y / \partial t(x,0)\) sıfır diyeceğiz. Sonra bu denklemin merkezi farklılık açılımını yapacağız ve oradan gelen eşitlikleri ana (1)’e sokarak sadece \(j=2\) için özel bir formül elde etmeyi umuyoruz.
\[ \frac{\partial y}{\partial t}(x,0) \simeq \frac{y(x, \Delta t)- y(x, -\Delta t)}{2\Delta t}=0, \ \Rightarrow \ y_{i, 0} = y_{i,2} \]
(1)’e sokunca
\[ y_{i,2} = y_{i,1}+ \frac{c^2} {c'^2} \left [ y_{i+1,1}+y_{i-1,1}-2 y_{i,1}\right] \]
Dikkat bu denklem sadece \(j=2\) için. Bundan sonraki her \(j\) için ana (1) formülü işleyecektir.
Stabilite, von Neumann
Çözümün stabil olması için \(c \le \frac{\Delta x}{\Delta t}\) şartının doğru olması gerekir, ve çoğunlukla \(\Delta x\) bizim kontrolümüzde olmaz, problemin dayattığı bir büyüklük olur, \(c\) fiziki modelin bir parçasıdır, o zaman \(\Delta t\)’nin diğer verili parametrelere göre şarta uygun seçilmesi gerekir. Şarta von Neumann ya da Courant stabilite şartı ismi veriliyor.
Türetmek için alttaki gibi bir yaklaşım [3] kullanılabilir. Fakat ilerlemeden önce Euler denkleminden türetilen bazı ek formülleri görelim, bu formüller birazdan işimize yarayacak. Euler formülü hatırlarsak,
\[ e^{ix} = \cos (x) + i\sin(x) \]
Üstteki formülü \(-x\) için yazarsak,
\[ e^{-ix} = \cos (-x) + i\sin(-x) \]
olur. Kosinüs’ün simetrik davranışı, yani \(\cos(-x)=\cos(x)\) ve \(-\sin(x)=\sin(-x)\) olması sebebiyle, üstteki
\[ = \cos(x) - i\sin(x) \]
olarak yazılabilir. Şimdi eğer \(e^{ix}\) ve \(e^{-ix}\)’i toplarsak, önceden gördüğümüz açılımlar üzerinden,
\[ e^{ix} + e^{-ix} = 2\cos(x) \]
olur, çünkü eksi işaretli \(\sin\) artı olanla beraber iptal olur. Tekrar düzenlersek,
\[ \cos(x) = \frac{1}{2} (e^{ix} + e^{-ix}) \tag{3} \]
Benzer bir eşitliği \(e^{ix} - e^{-ix}\) üzerinden elde edebiliriz,
\[ e^{ix} - e^{-ix} = 2i\sin(x) \]
Tekrar düzenleyince aynen biraz önce bir \(\cos\) tanımı elde ettiğimiz gibi bir de \(\sin\) tanımı elde ederiz,
\[ \sin(x) = \frac{1}{2i} (e^{ix} - e^{-ix}) \]
Dalga kısmi denklemi ne idi?
\[ \partial_t^2 y(x,t) = c(x)^2 \partial_x^2 y(x,t) \]
[2] notasyonu \(c\) yerine \(c(x)\) kullanmış. Şimdi stabilite şartını türetmek için çözümün basit bir düzlem dalgası (plane wave) olduğunu farz edeceğiz [1], yani çözüm
\[ y(x,t) = e^{i(kx-\omega t)} \]
formunda olacak. Bu formu ayrıksallaştırıp kısmı türevsel forma sokunca çıkan eşitlikler üzerinden bir stabilite şartı elde etmek amacımız. [3] notasyonu yerine [2]’imsi notasyon kullanacağız, yani \(x,t\) indisleri \(i,j\) yerine \(j,n\), herhalde hayali sayı \(i\) ile karışıklık olmasın diye böyle seçilmiş. O zaman \(x \to j \Delta x\), \(t \to n \Delta t\) olur.
Alttaki analitik soldaki formül ayrıksal şu hale gelir,
\[ y(x,t) = e^{i(kx - \omega t)} \to y_{j,n} = e^{i(kj\Delta x - \omega n \Delta t)} \]
Peki bu formülleri (2) bağlamında nasıl kullanacağız? Aslında bu çok basit.
Mesela \(y_{j+1,n}\) için ayrıksal uzayda bir adım atmış oluyoruz, bu adımın basit dalga formülünde karşılığı
\[ y_{j+1,n} = e^{i ( k(j+1)\Delta x - \omega n \Delta t )} \]
Karışık gibi duruyor fakat \(e\) bazlı işlem yapmanın faydasını göreceğiz şimdi,
\[ = e^{i k \Delta x} e^{i(k j \Delta x - \omega n \Delta t)} \]
Bir \(e\) bazlı terimi dışarı çekmiş olduk. Geri kalan sağdaki \(e\) bloğuna bakınca onun \(y_{j,n}\) olduğunu görüyoruz! O zaman
\[ y_{j+1,n} = e^{i k \Delta x} y_{j,n} \]
Benzer bir işlemi \(y_{j-1,n}\) için de gerçekleştirebiliriz,
\[ y_{j-1,n} = e^{-i k \Delta x} e^{i(k j \Delta x - \omega n \Delta t)} \]
\[ = e^{-i k \Delta x} y_{j,n} \]
Teknik ayrıksal zaman üzerinde de işliyor,
\[ y_{j,n+1} = e^{-i k \Delta t} y_{j,n} \]
\[ y_{j,n-1} = e^{i k \Delta t} y_{j,n} \]
O zaman bu öğeleri dalga denklemi (2)’ye sokabiliriz. O denklemi [2]’ye göre birazcık değiştirip tekrar verelim,
\[ \frac{y_{j,n+1} - 2 y_{j,n} + y_{j,n-1} }{\Delta t^2} = c_j^2 \left[ \frac{ y_{j+1,n} - 2 y_{j,n} + y_{j-1,n} }{\Delta x^2} \right] \]
Şimdi üstteki formülde sonlu ayrıksal terimleri, yani \(y_{j,n+1}\), \(y_{j,n-1}\), \(y_{j+1,n}\), ve \(y_{j-1,n}\) terimlerini, biraz önce bulduğumuz üstel terimlerle değiştirelim,
\[ e^{i(k j \Delta x - \omega n \Delta t)} \left[ \frac{ e^{i\omega \Delta t} - 2 + e^{-i\omega \Delta t} } {\Delta t^2}\right] = c^2 \left[ \frac{e^{ik\Delta x} - 2 + e^{-ik\Delta x}} {\Delta x^2} \right] e^{i(k j \Delta x - \omega n \Delta t)} \]
\(c_j \to c\) geçişi her \(j \Delta x\) noktasına göre tanımlanıyor muhakkak.
Devam edelim, son formülde basitleştirme yapılabilir, en sol ve sağdaki terimler iptal olabilir,
\[ \left[ \frac{ e^{i\omega \Delta t} - 2 + e^{-i\omega \Delta t} } {\Delta t^2}\right] = c^2 \left[ \frac{e^{ik\Delta x} - 2 + e^{-ik\Delta x}} {\Delta x^2} \right] \]
Geri kalanları tekrar düzenleyelim,
\[ e^{i\omega \Delta t} + e^{-i\omega \Delta t} - 2 = c^2 \frac{\Delta t^2}{\Delta x^2} [ e^{ik\Delta x} - e^{-ik\Delta x} - 2] \]
Hayali terimlerden kurtulmak istiyoruz tabii, bu noktada (3)’teki kosinüs tanımını tekrar hatırlayalım, onu kullanırsak, eşitliğin solundaki iki terim ve sağındaki iki terim için ayrı ayrı,
\[ 2 \cos(\omega \Delta t) - 2 = c^2 \frac{\Delta t^2}{\Delta x^2} (2 \cos(k\Delta x) - 2) \]
Herşeyi 2 ile bölelim,
\[ \cos(\omega \Delta t) - 1 = c^2 \frac{\Delta t^2}{\Delta x^2} (\cos(k\Delta x) - 1) \tag{4} \]
Şimdi bir diğer trigonometrik eşitliği kullanacağız [4],
\[ 2\sin^2(x) = 1 - \cos (2x) \]
Biraz degistirirsek,
\[ \sin (x) = \sqrt{1 - \cos (2x)} \]
Ya da
\[ \sin (\frac{x}{2}) = \pm \sqrt{1 - \cos (x)} \]
Bu eşitliğin (4) ifadesini nasıl basitleştireceğini görmek zor değil,
\[ \sin^2(\omega \frac{\Delta t}{r}) = c^2 \frac{\Delta t^2}{\Delta x^2} \sin^2 (k \frac{\Delta x}{2} ) \]
Karelerden kurtulabiliriz,
\[ \sin(\omega \frac{\Delta t}{r}) = c \frac{\Delta t}{\Delta x} \sin (k \frac{\Delta x}{2} ) \]
İşte bu basit denklem sayısal analizin en temel bulgularından birine götürdü bizi.
Üstteki denklemin reel sonuçlara sahip olması için
\[ c \frac{\Delta t}{\Delta x} \le 1 \]
olmalıdır. Bu koşul artık ünlü olan Courant-Friedrichs-Lewy (CFL) koşulu, ya da kriteridir. Bu koşul iki tür hızın arasında bir ilişki kurar, biri fiziksel hız, ki fiziksel ortamda dalganın yayılma hızı bu, diğeri ise “algoritmik hız’’ bir anlamda, bizim tanımladığımız ızgaranın genişliği \(\Delta x\) bölü yine bizim seçtiğimiz zaman aralığı \(\Delta t\).
rho = 0.01;
ten = 40.;
c = np.sqrt(ten/rho)
c1 = c;
ratio = c*c/(c1*c1) # CFL kriteri = 1
# dongunun her adiminda sadece uc zaman dilimi yeterli, o sebeple
# xi [_,3] boyutunda.
xi = np.zeros((101,3), float)
k = range(0,101)
for i in range(0, 81):
xi[i, 0] = 0.00125*i
for i in range (81, 101):
xi[i, 0] = 0.1 - 0.005*(i - 80)
fig = plt.figure()
for i in range(1,100):
xi[i,1] = xi[i,0] + 0.5*ratio*(xi[i+1,0] + xi[i-1,0] -2*xi[i,0])
for j in range(100):
for i in range(1, 100):
xi[i,2] = 2.*xi[i,1]-xi[i,0]+ratio*(xi[i+1,1]+xi[i-1,1]-2*xi[i,1])
if j % 5 == 0:
plt.grid(True)
plt.xlim(0, 101)
plt.ylim(-0.15, 0.15)
plt.plot(k,xi[k,2])
plt.savefig('/tmp/string-%02d.png' % j)
plt.clf()
# bitti, 1,2 indisi yeni 0,1 olacak
for m in range (0,101):
xi[m, 0] = xi[m, 1]
xi[m, 1] = xi[m, 2]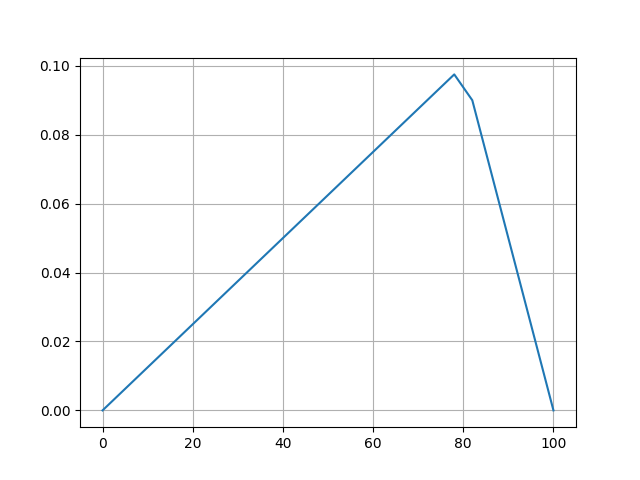
import os
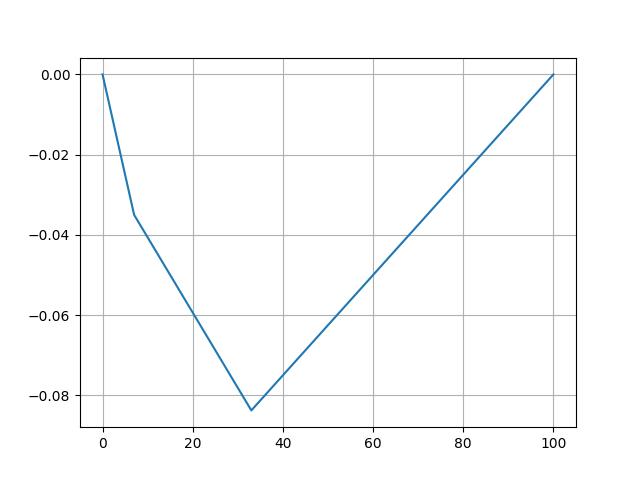
os.system("convert -loop 0 -delay 100 /tmp/string*.png string.gif")Animasyonlu sonucu [5]’te bulabiliriz.
Tek Boyutlu Lineer Taşınım Akımı (Convection)
Tek boyutlu lineer taşınım akımı, ya da tek boyutlu lineer yatay iletim (advection), CFD hakkında bir şeyler öğrenmek için güzel fırsatlar içeriyor. Bu ufak denklemin bize ne kadar çok şey öğreteceğini görmek bizi şaşırtabilir. Denklem,
\[ \frac{\partial u}{\partial t} + c \frac{\partial u}{\partial x} = 0 \tag{2} \]
Dikkat bu bir dalga denklemi olarak bilinir, fakat esas dalga denkleminin kısmi türevsel formu ikinci kısmi türevi içeriyor, bkz [7]. Üstteki denklem verili başlangıç şartlarına göre bir basit dalganın şekil değiştirmeden \(c\) hızında yayılmasını temsil eder. Başlangıç şartlarını \(u(x,0) = u_0(x)\) olarak gösterirsek, denklemin kesin analitik çözümü \(u(x,y) = u_0(x-ct)\).
Üstteki formülü süreklilik denkleminin [8] bir formu olarak ta görebiliriz [9, sf. 557]. Süreklilik denklemi
\[ \frac{\partial \rho}{\partial t} + \nabla \cdot (\rho \bar{u} ) = 0 \]
idi, bu formülü tek boyutta düşünürsek ve sabit hız \(\bar{u} = c\) alırsak (2)’ye ulaşırız.
Denklemi hem zaman, hem uzay bağlamında ayrıksallaştıracağız. Türev tanımından (ve limit ifadesini çıkartınca),
\[ \frac{\partial u}{\partial x} \approx \frac{u(x+\Delta x) - u(x)}{\Delta x} \]
olduğunu biliyoruz. Şimdi zamanda İleri Farklılık (Forward Difference), uzayda Geriye Farklılık (Backward Difference) kullanalım.. Ve eğer \(x\) eksenini \(N\) parçaya ayırırsak ve bu parçaları \(i=0,..,N\) ile indekslersek, ve en ufak zaman adımını da \(\Delta t\) ile gösterip o adımı \(n\) ile indislersek,
\[ \frac{u_i^{n+1} - u_i^n}{\Delta t} + c \frac{u_i^{n} - u_{i-1}^n}{\Delta x} = 0 \]
ki \(n\) ve \(n+1\) ardı ardına olan iki zaman adımı, \(i-1\) ve \(i\) ise ayrıksallaştırılmış iki \(x\) yeri oluyor. Eğer başlangıç koşulları verilmiş ise o zaman bu ayrıksal sistemde tek bilinmeyen \(u_i^{n+1}\)’dir. Denklemi tekrar düzenlersek bilinmeyen için yeni bir formül elde edebiliriz,
\[ u_i^{n+1} = u_i^n - c \frac{\Delta t}{\Delta x} ( u_i^n - u_{i-1}^n ) \tag{1} \]
Yeri temsil eden \(x\) eksenini eşit
aralıklı parçalara böleceğiz, bir tek boyutlu ızgara yaratacağız,
genişlik 2 birim olacak, nx değişkeni kaç tane ızgara
noktası olduğunu tanımlayacak, dx iki nokta arasındaki
uzaklık.
import time, sys
nx = 41
dx = 2 / (nx-1)
nt = 25
dt = .025
c = 1 Başlangıç şartlarını tanımlamak lazım, başlangıç hızı \(u_0\) aralık \(0.5 \leq x \leq 1\) içinde \(u = 2\), diğer her yerde \(u = 1\).
u = np.ones(nx)
u[int(.5 / dx):int(1 / dx + 1)] = 2
print(u)[1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 2. 2. 2. 2. 2. 2. 2. 2. 2. 2. 2. 1. 1. 1.
1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1. 1.]plt.plot(np.linspace(0, 2, nx), u);
plt.savefig('compscieng_app45cfd1_01.png')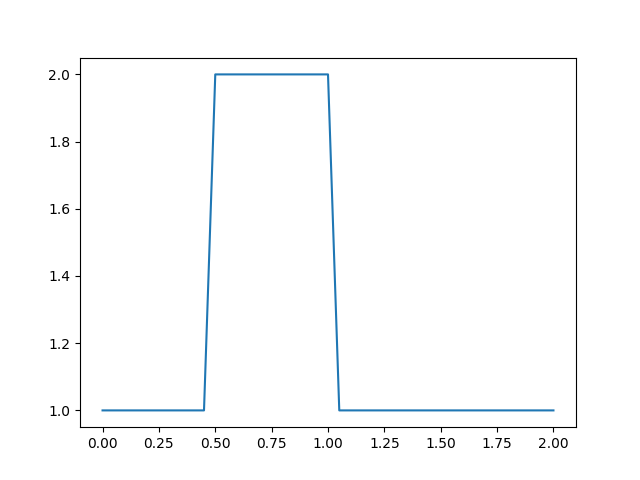
Üstteki bir fonksiyon türü aslında, ona görüntüsü sebebiyle “şapka fonksiyonu’’ ismi de veriliyor.
Şimdi taşınım akımı denkleminin ayrıksal kodlamasına gelelim, burada sonlu farklılık (finite difference) yaklaşımı kullanıyoruz, \(u\) vektörü içindeki her öge için (1) formülünü işleteceğiz.
un = np.ones(nx)
for n in range(nt):
un = u.copy()
for i in range(1, nx):
u[i] = un[i] - c * dt / dx * (un[i] - un[i-1]) Üstteki işlemle zamanı ileri sardık ve fonksiyon belli bir noktaya geldi. Nereye geldi?
plt.plot(np.linspace(0, 2, nx), u);
plt.savefig('compscieng_app45cfd1_02.png')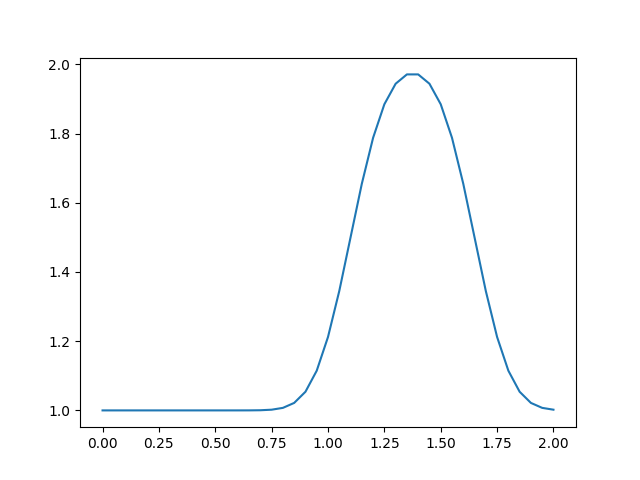
Evet, başlangıç fonksiyonu hakikaten sağa doğru taşındı. Fakat artık
fonksiyon bir şapka değil. Ne oldu? Sonuç yaklaşık temsilin kalitesiyle
alakalı, dx ve dt küçültüldükçe kalite
artacaktır, ve şapkaya daha çok benzeyen sonuçlar görülecektir.
Gayrı Lineer Taşınım Akımı (Nonlinear Convection)
Şimdi biraz önceki teknikleri kullanarak gayrı lineer taşınım akımı kodlayacağız, tek boyutta denklem,
\[ \frac{\partial u}{\partial t} + u \frac{\partial u}{\partial c} = 0 \]
Dikkat edersek önceki denklemdeki \(c\) ile çarpım yerine şimdi \(u\) ile çarpım var, bu sebeple formülün ikinci terimi gayrı lineer hale geldi. Eğer ayrıksallaştırma işlemini tekrar uygularsak, alttaki sonuca erişiriz,
\[ u_i^{n+1} = u_i^n - u_i^n \frac{\Delta t}{\Delta x} ( u_i^n - u_{i-1}^n ) \]
nx = 41
dx = 2 / (nx - 1)
nt = 20
dt = .025
u = np.ones(nx)
u[int(.5 / dx) : int(1 / dx + 1)] = 2
un = np.ones(nx)un = np.ones(nx)
for n in range(nt):
un = u.copy()
for i in range(1, nx):
u[i] = un[i] - un[i] * dt / dx * (un[i] - un[i-1]) plt.plot(np.linspace(0, 2, nx), u);
plt.savefig('compscieng_app45cfd1_03.png')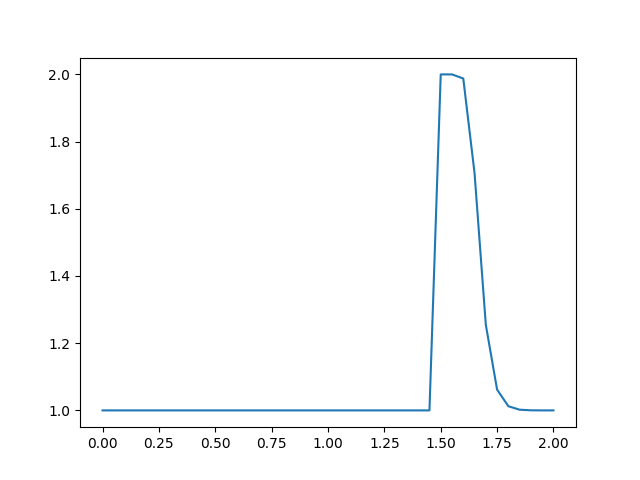
Yakınsama (Convergence)
Lineer taşınım hesabında ortaya çıkan tepe şeklinin ızgara
çözünülürlüğü ile alakalı olduğunu söylemiştik. Bunu birkaç farklı
çözünürlük ile deneyerek görelim. İlk gördüğümüz sonuç
nx=41 kullandı. Arttıralım,
def linearconv(nx):
dx = 2 / (nx - 1)
nt = 20
dt = .025
c = 1
u = np.ones(nx)
u[int(.5/dx):int(1 / dx + 1)] = 2
un = np.ones(nx)
for n in range(nt):
un = u.copy()
for i in range(1, nx):
u[i] = un[i] - c * dt / dx * (un[i] - un[i-1])
plt.plot(np.linspace(0, 2, nx), u);
linearconv(61)
plt.savefig('compscieng_app45cfd1_04.png')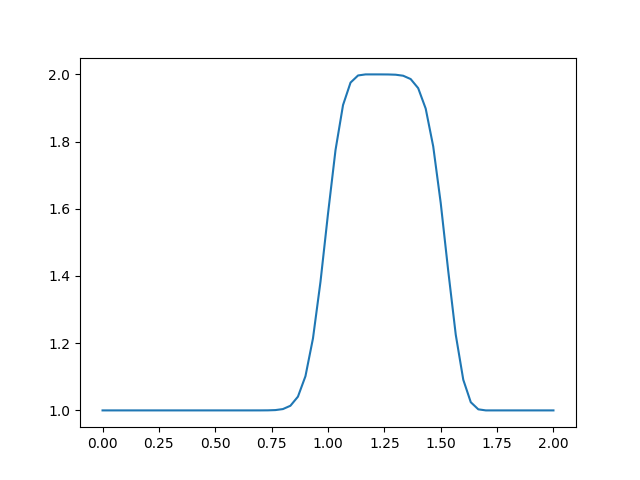
linearconv(71)
plt.savefig('compscieng_app45cfd1_05.png')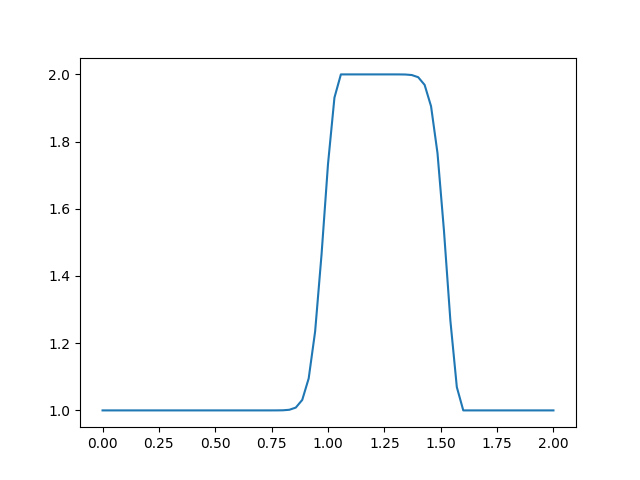
Gittikçe daha fazla şapka fonsiyonuna benzer sonuçlar alıyoruz. Şimdi dikkat, bir kez daha arttıralım,
linearconv(85)
plt.savefig('compscieng_app45cfd1_06.png')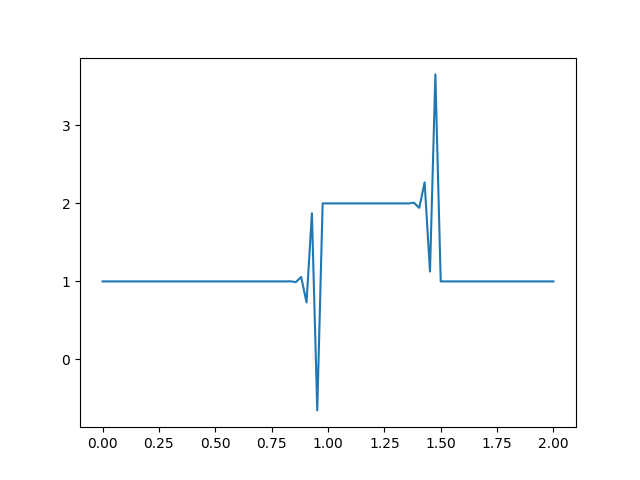
Bu sonuç şapka fonksiyonuna benzemiyor. Ne oldu?
Hesaplananları düşünürsek, yer ekseni üzerinde dalganın hareketini
hesaplıyoruz, fakat her adımda \(\Delta t =
0.025\) farzederk bu hesapları yapıyoruz. Üstteki yanlış sonuçta
\(\Delta t\) zaman aralığında öyle bir
adım attık ki bu adım dx’in büyüklüğünden daha fazla. Bu
durum ilk denemelerde ortaya çıkmadı çünkü dx yeterince
büyük tutulmuştu. Fakat onu küçültükçe bir noktada hesap patladı.
Stabilite için \(\Delta t\) adımını \(\Delta x\) ile ilişkilendirecek bir formül faydalıdır, böyle bir formül var,
\[ \sigma = \frac{u \Delta t}{\Delta x} \le \sigma_{max} \]
\(u\) dalganın hızı, \(\sigma\) degiskeni Courant sayısı, ve \(\sigma_{max}\) stabiliteyi sağlayacak üst limit. Çoğunlukla \(\sigma_{max} = 1\) seçilir. Bu ilişkinin türetilmesini [12]’de bulabiliriz.
Diffusion (Yayınım) Denklemi
Tek boyuttaki yayınım denklemi,
\[ \frac{\partial u}{\partial t} = \nu \frac{\partial^2 u}{\partial x^2} \]
Dikkat edersek bu denklemde bir ikinci kısmı türev var. Denklemin o kısmını Merkezi Farklar yaklaşımı ile ayrıksal hale getireceğiz, bu yaklaşım İleri Farklar ve Geriye Farklar yaklaşımlarının birleştirilmesi ile elde edilir.
Önce Taylor serilerini hatırlarsak, genel tanım
\[ f(x+h) = f(x) + h f'(x) + \frac{h^2}{2} f''(x) + ... \]
Biz \(u_{i+1}\) ve \(u_{i-1}\) açılımını Taylor serisi ile yapmak istiyoruz, daha önce belirttiğimiz gibi bir önceki ve sonraki \(x\) değerleri \(\Delta x\) uzaklığında, yani bir önceki
\[ u(x-\Delta x) = u(x) - \Delta x f'(x) + \frac{h^2}{2} u''(x) + ... \]
İşaretin eksi olmasına dikkat, ve sonraki
\[ u(x+\Delta x) = u(x) + \Delta x f'(x) + \frac{h^2}{2} u''(x) + ... \]
Şimdi indisleriyle \(u\) için ve [6]’deki formuyla yazalım,
\[ u_{i+1} = u_i + \Delta x \frac{\partial u}{\partial x}\bigg|_i + \frac{\Delta x^2}{2} \frac{\partial ^2 u}{\partial x^2}\bigg|_i + \frac{\Delta x^3}{3!} \frac{\partial ^3 u}{\partial x^3}\bigg|_i + O(\Delta x^4) \]
\[ u_{i-1} = u_i - \Delta x \frac{\partial u}{\partial x}\bigg|_i + \frac{\Delta x^2}{2} \frac{\partial ^2 u}{\partial x^2}\bigg|_i - \frac{\Delta x^3}{3!} \frac{\partial ^3 u}{\partial x^3}\bigg|_i + O(\Delta x^4) \]
Bir üstteki denklemin ilk hali $u_i = u_{i-1} … $ ile ama ufak bir yer değişimi ile görülen biçim elde edilmiş.
Son iki formülü toplarsak bazı terimlerin ters işaretli olması sebebiyle iptal olacağını görebiriliz. Ayrıca yaklaşık temsil açısından \(O(\Delta x^4)\) ve daha üstü kuvvetleri yok sayarsak,
\[ u_{i+1} + u_{i-1} = 2u_i+\Delta x^2 \frac{\partial ^2 u}{\partial x^2}\bigg|_i + O(\Delta x^4) \]
\(\frac{\partial ^2 u}{\partial x^2}\bigg|_i\) için çözersek ve tekrar düzenlersek,
\[ \frac{\partial ^2 u}{\partial x^2}=\frac{u_{i+1}-2u_{i}+u_{i-1}}{\Delta x^2} + O(\Delta x^2) \]
\(O(\Delta x^2)\) ifadesi \(O(\Delta x^4)\) terimi \(\Delta x^2\) ile bölününce ortaya çıktı.
Artık 1D yayınım formülünün nihai ayrıksal halini yazabiliriz,
\[ \frac{u_{i}^{n+1}-u_{i}^{n}}{\Delta t} = \nu\frac{u_{i+1}^{n}-2u_{i}^{n}+u_{i-1}^{n}}{\Delta x^2} \]
Daha önce olduğu gibi başlangıç koşuları tanımlı ise tek bilinmeyen \(u_{i}^{n+1}\), bu bilinmeyen eşitliğin solunda kalacak şekilde tekrar düzenlersek,
\[ u_{i}^{n+1} = u_{i}^{n}+\frac{\nu\Delta t}{\Delta x^2}(u_{i+1}^{n}-2u_{i}^{n}+u_{i-1}^{n}) \]
Üstteki denklem bize çözümü adım adım ilerletmemizi sağlayacak. Ama bir başlangıç koşuluna ihtiyacımız var, daha önceki favorimize dönebiliriz, şapka fonksiyonu. \(t=2\)’de \(u=0\), \(0.5\le x\le 1\) aralığında ise \(u=1\).
nx = 41
dx = 2 / (nx - 1)
nt = 20
nu = 0.3
sigma = .2
dt = sigma * dx**2 / nu
u = np.ones(nx)
u[int(.5 / dx):int(1 / dx + 1)] = 2
un = np.ones(nx)
for n in range(nt):
un = u.copy()
for i in range(1, nx - 1):
u[i] = un[i] + nu * dt / dx**2 * (un[i+1] - 2 * un[i] + un[i-1])
plt.plot(np.linspace(0, 2, nx), u);
plt.savefig('compscieng_app45cfd2_01.png')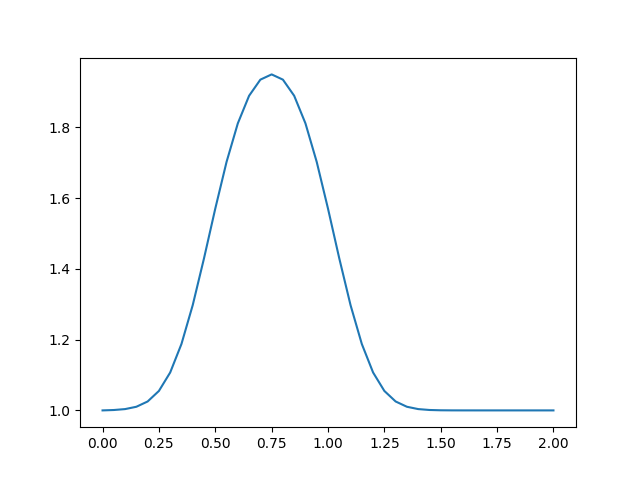
2D Taşınım (2D Convection)
2 boyuta geçme zamanı geldi. 2D lineer taşınım akımını (convection) temsil eden parçalı kısmi diferansiyel denklem,
\[ \frac{\partial u}{\partial t} + c\frac{\partial u}{\partial x} + c\frac{\partial u}{\partial y} = 0 \]
Bu 1D lineer taşınım akımı ile neredeyse aynı formda, sadece şimdi tek yersel boyut yerine iki tane boyutumuz var, \(x\) ve \(y\).
Ayrıksal hale getirmek için aynı yaklaşımı kullanacağız, zaman adımlarını ileri farklar, konumsal değişkenleri ise geriye farklar yöntemi ile ayrıksal yapacağız. 1D durumda \(i\) altsimgesini konumda olan hareketlilik için kullanmıştık, \(u_{i}^n-u_{i-1}^n\) mesela. Şimdi, 2D durumda, ikinci bir altsimge \(j\) ekliyoruz, \(y\) boyutunu böylece indislemiş olacağız.
Tüm bunları kullanarak ayrıksal forma erişmek zor değil,
\[ \frac{u_{i,j}^{n+1}-u_{i,j}^n}{\Delta t} + c\frac{u_{i, j}^n-u_{i-1,j}^n}{\Delta x} + c\frac{u_{i,j}^n-u_{i,j-1}^n}{\Delta y}=0 \]
Daha önce olduğu gibi tek bilinmeyene göre tekrar düzenleyelim,
\[ u_{i,j}^{n+1} = u_{i,j}^n-c \frac{\Delta t}{\Delta x}(u_{i,j}^n-u_{i-1,j}^n) - c \frac{\Delta t}{\Delta y}(u_{i,j}^n-u_{i,j-1}^n) \]
Denklemi alttaki başlangıç şartlarına göre çözeceğiz,
\[ u(x,y) = \begin{cases} \begin{matrix} 2\ & 0.5 \leq x, y \leq 1 & \text{için} \cr 1\ & \text{diğer her yerde} \end{matrix}\end{cases} \]
Sınır şartları
\[ u = 1\ \text{değeri } \begin{cases} \begin{matrix} x = 0,\ 2 \cr y = 0,\ 2 \end{matrix}\end{cases} \text{ için } \]
from mpl_toolkits.mplot3d import Axes3D
from matplotlib import cm
nx = 81
ny = 81
nt = 100
c = 1
dx = 2 / (nx - 1)
dy = 2 / (ny - 1)
sigma = .2
dt = sigma * dx
x = np.linspace(0, 2, nx)
y = np.linspace(0, 2, ny)
u = np.ones((ny, nx)) ##create a 1xn vector of 1's
un = np.ones((ny, nx)) ##
u[int(.5 / dy):int(1 / dy + 1),int(.5 / dx):int(1 / dx + 1)] = 2
fig, ax = plt.subplots(1, 1, subplot_kw={'projection': '3d'})
X, Y = np.meshgrid(x, y)
surf = ax.plot_surface(X, Y, u[:], cmap=cm.viridis)
plt.savefig('compscieng_app45cfd3_01.png')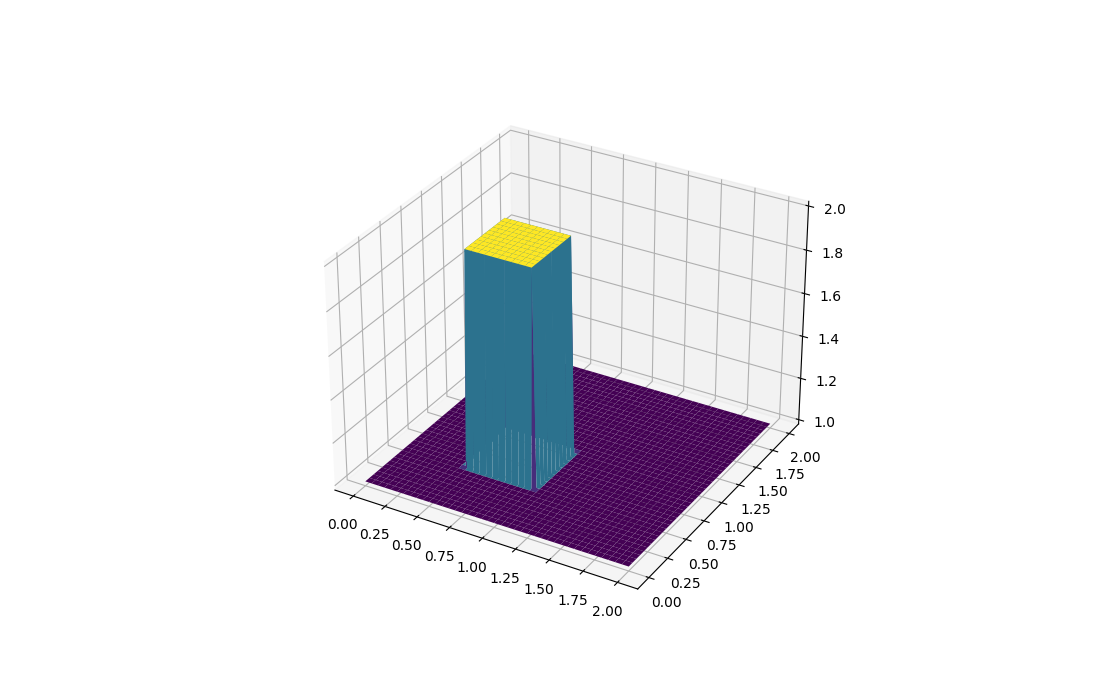
İki boyutta zamanı ileri saralım şimdi. Tüm \(i\) ve \(j\)’leri işleyebilmek için bir içiçe geçmiş
döngü gerekiyor bize. Python dilinde for kullanmak çok
optimal değildir, ama alttaki kod neler olduğunu gösterebilmek için
yardımcı olacaktır.
u = np.ones((ny, nx))
u[int(.5 / dy):int(1 / dy + 1), int(.5 / dx):int(1 / dx + 1)] = 2
for n in range(nt + 1):
un = u.copy()
row, col = u.shape
for j in range(1, row):
for i in range(1, col):
tmp1 = (c * dt / dx * (un[j, i] - un[j, i - 1]))
tmp2 = (c * dt / dy * (un[j, i] - un[j - 1, i]))
u[j, i] = (un[j, i] - tmp1 - tmp2)
u[0, :] = 1
u[-1, :] = 1
u[:, 0] = 1
u[:, -1] = 1
fig, ax = plt.subplots(1, 1, subplot_kw={'projection': '3d'})
surf2 = ax.plot_surface(X, Y, u[:], cmap=cm.viridis)
plt.savefig('compscieng_app45cfd3_02.png')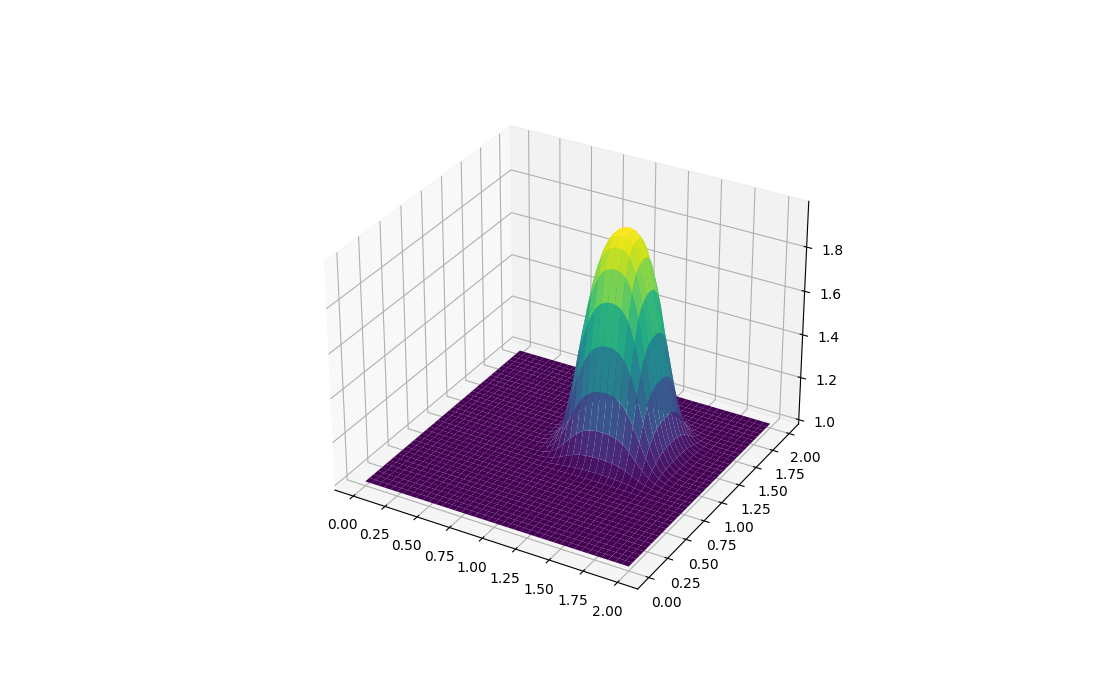
Burgers’in Denklemi
Bu denklem tek boyutta şuna benziyor
\[ \frac{\partial u}{\partial t} + u \frac{\partial u}{\partial x} = \nu \frac{\partial ^2u}{\partial x^2} \]
Görüldüğü gibi bu formül gayrı lineer taşınım akımı (convection) ile yayınım (diffusion) formüllerinin birleşimi. O zaman denklemi önce gördüğümüz teknikler ile ayrıksal hale getirebiliriz.
\[ \frac{u_i^{n+1}-u_i^n}{\Delta t} + u_i^n \frac{u_i^n - u_{i-1}^n}{\Delta x} = \nu \frac{u_{i+1}^n - 2u_i^n + u_{i-1}^n}{\Delta x^2} \]
Daha önce olduğu gibi başlangıç koşulumuz var, ona göre denklemi tekrar düzenliyoruz,
\[ u_i^{n+1} = u_i^n - u_i^n \frac{\Delta t}{\Delta x} (u_i^n - u_{i-1}^n) + \nu \frac{\Delta t}{\Delta x^2}(u_{i+1}^n - 2u_i^n + u_{i-1}^n) \]
Bu örnekte farklı bir başlangıç şartı kullanacağız.
\[ u = -\frac{2 \nu}{\phi} \frac{\partial \phi}{\partial x} + 4 \]
\[ \phi = \exp \bigg(\frac{-x^2}{4 \nu} \bigg) + \exp \bigg(\frac{-(x-2 \pi)^2}{4 \nu} \bigg) \]
Bu başlangıç şartlarına göre Burgers denkleminin analitik çözümü biliniyor,
\[ u = -\frac{2 \nu}{\phi} \frac{\partial \phi}{\partial x} + 4 \]
\[ \phi = \exp \bigg(\frac{-(x-4t)^2}{4 \nu (t+1)} \bigg) + \exp \bigg(\frac{-(x-4t -2 \pi)^2}{4 \nu(t+1)} \bigg) \]
Sınır şartı
\[ u(0) = u(2\pi) \]
Fakat başlangıç şartını belli ızgara noktalarında işletebilmek
istiyoruz, fakat üstteki formülde çetrefil bir form var, birşeylerin
türevi vs var. Ne yapacağız? Paket sympy
kullanılabilir.
import sympy
from sympy.utilities.lambdify import lambdify
from sympy import init_printing
init_printing(use_latex=True)
x, nu, t = sympy.symbols('x nu t')
phi = (sympy.exp(-(x - 4 * t)**2 / (4 * nu * (t + 1))) +
sympy.exp(-(x - 4 * t - 2 * sympy.pi)**2 / (4 * nu * (t + 1))))
phiprime = phi.diff(x)
u = -2 * nu * (phiprime / phi) + 4
ufunc = lambdify((t, x, nu), u)
print(ufunc(1, 4, 3))3.49170664206445nx = 101
nt = 100
dx = 2 * np.pi / (nx - 1)
nu = .07
dt = dx * nu
x = np.linspace(0, 2 * np.pi, nx)
un = np.empty(nx)
t = 0
u = np.asarray([ufunc(t, x0, nu) for x0 in x])plt.figure(figsize=(11, 7), dpi=100)
plt.plot(x, u, marker='o', lw=2)
plt.xlim([0, 2 * np.pi])
plt.ylim([0, 10]);
plt.savefig('compscieng_app45cfd2_02.png')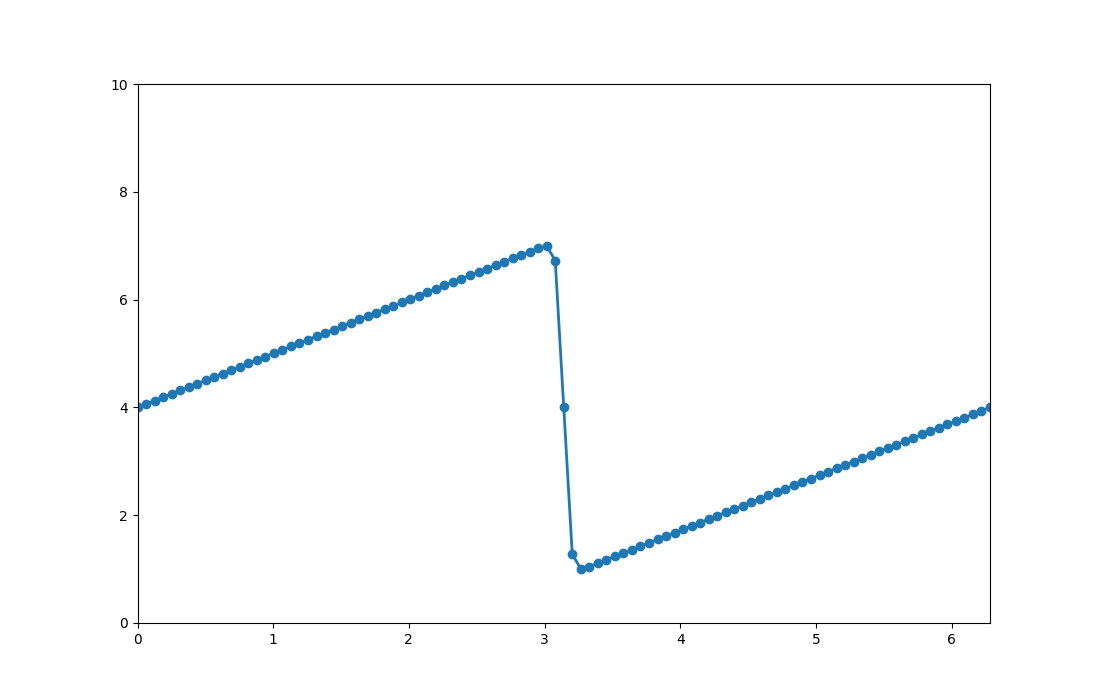
for n in range(nt):
un = u.copy()
for i in range(1, nx-1):
u[i] = un[i] - un[i] * dt / dx *(un[i] - un[i-1]) + nu * dt / dx**2 *\
(un[i+1] - 2 * un[i] + un[i-1])
u[0] = un[0] - un[0] * dt / dx * (un[0] - un[-2]) + nu * dt / dx**2 *\
(un[1] - 2 * un[0] + un[-2])
u[-1] = u[0]
u_analytical = np.asarray([ufunc(nt * dt, xi, nu) for xi in x])plt.figure(figsize=(11, 7), dpi=100)
plt.plot(x,u, marker='o', lw=2, label='Hesapsal')
plt.plot(x, u_analytical, label='Analitik')
plt.xlim([0, 2 * np.pi])
plt.ylim([0, 10])
plt.legend();
plt.savefig('compscieng_app45cfd2_03.png')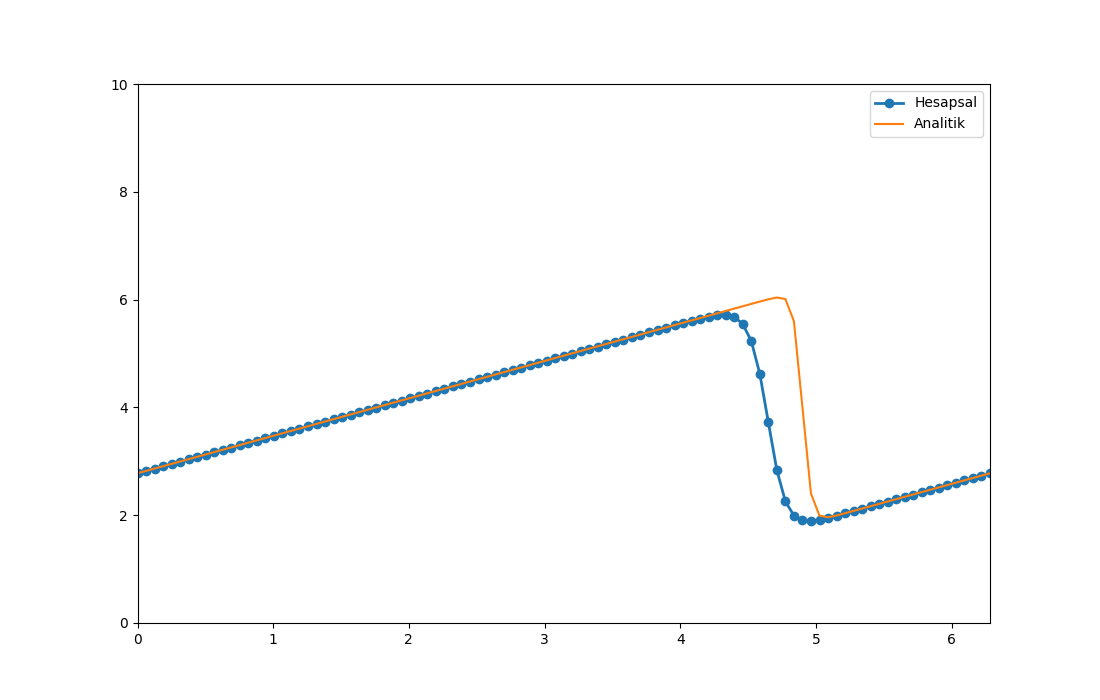
Alternatif Anlatim [9, sf. 559]
Tek boyutta Burgers’in denklemi,
\[ \frac{\partial u}{\partial t} + \epsilon u \frac{\partial u}{\partial x} = 0 \]
olarak ta gösterilebilir. Denklemin muhafazakar formu (ayrıksallaştırmada işi kolaylaştırıyor),
\[ \frac{\partial u}{\partial t} + \epsilon \frac{\partial (u^2 / 2)}{\partial x} = 0 \]
\(u^2\) nereden geldi? \(u^2\) üzerinde \(\partial / \partial x\) türevi uygulanınca Zincirleme Kanunu ile \(2 u \cdot \partial u / \partial x\) elde ederdik, o zaman bu formülü 2 ile bölerek iki üstteki forma erisebiliriz.
Bu denklem taşınım formülünün bir şekli bir anlamda, eğer dalga hızı \(c = \epsilon u\) dersek. Dikkat edersek bu durumda dalga hızı dalga boyuna (amplitude) oranlı hale geliyor, yani dalganın üst tarafında hız daha artacak. Denkleme eklenen bir gayri lineerlik ilginç davranışlara yol açıyor. Taşınım formülünde dalganın her kısmı aynı hızda hareket eder, “taşınır’’, ve bu sebeple dalga şeklinde bir değişim olmaz. Ama dalganın üst kısmı alt kısmına göre daha hızlı hareket ederse şekil değişimi olur, dalganın üstü daha ileri gider, şok dalgası (shock wave) denen durumu ortaya çıkartır.
Kaynaklar
[1] Bayramlı, Fizik, Isı ve Dalga Denklemleri
[2] Igel, Computers, Waves, Simulations, Coursera Lecture, Week 3, von Neumann Analysis, https://www.coursera.org/learn/computers-waves-simulations
[3] Landau, Landau Computational Physics Course, Video Lectures, https://www.youtube.com/playlist?list=PLnWQ_pnPVzmJnp794rQXIcwJIjwy7Nb2U
[4] Bayramlı, Diferansiyel Denklemler, Ekler, Trigonometri
[5] Bayramlı, Animasyon, https://raw.githubusercontent.com/burakbayramli/classnotes/master/compscieng/compscieng_app17wave/string.gif
[6] Barba, 12 steps to Navier–Stokes, Ders 1, https://nbviewer.jupyter.org/github/barbagroup/CFDPython/tree/master/lessons/
[7] Bayramlı, Fizik, Isı ve Dalga Denklemlerini Türetmek
[8] Bayramlı, Fizik, Akış Dinamiği
[9] Landau, Computational Physics
[10] Mittleman, Applied Electromagnetics ENGN1560 Brown Lecture
[11] Logan, Applied Mathematics, Third Edition
[12] Bayramlı, Hesapsal Bilim, Dalga Denklemi
{kind=link}