Çizgi Parçası ve bir 3D Üçgenin Kesişmesi
Bir çizgi parçasını temsil etmek için \(s\) başlangıç noktasından \(t\) varış noktasına giden bir ışın (ray) hayal edelim, bu çizgi parçası üzerindeki herhangi bir \(x\) noktası [9, sf. 84]
\[ x = s + \lambda (t-s) \quad 0 \le \lambda \le 1 \tag{1} \]
ile temsil edilebilir, ki \(x,s,t\) üç boyutlu vektörler olmak üzere, yani \(\vec{x},\vec{s},\vec{t}\).
Bir üçgenin tüm yüzeyini, yani üç noktası arasında kalan tüm alanı üç boyutta temsil etmek gerekli, çünkü kesişim bu alanda bir yerde olacak, bunun için ağırlık merkezli (barycentric) kordinat sistemi kullanabiliriz, üçgen içindeki herhangi bir \(x\) noktasını üç köşe noktasının farklı ağırlıklarla çarpılıp toplanmış hali olarak görebiliriz, yani üç köşe \(p_0,p_1,p_2\) için
\[ x = \mu_0 p_0 + \mu_1 p_1 + \mu_2 p_2, \quad \mu_0 + \mu_1 + \mu_2 = 1, \mu_i \ge 0 \]
Formülden \(\mu_0\)’i atmak mümkün, onu diğerleri bazında gösterebiliriz, \(\mu_0 = 1-\mu_1-\mu_2\), üstteki formülü tekrar düzenleyince,
\[ x = p_0 + \mu_1 (p_1 - p_0) + \mu_2 (p_2 - p_0) \tag{2} \]
Böylece, (1),(2) ile, bizi çizgi parçası biri üçgen sathi ile ilgili iki formül elde ettik. Kesişme noktası bu iki formülün \(x\)’leri aynı olduğu yerdedir değil mi? \(r=t-s\), \(d_1=p_1-p_0\), \(d_2 = p_2-p_0\) diyelim, ve (1) ile (2)’yi \(x\) üzerinden birbirine eşitleyelim,
\[ s + r\lambda = p_0 + \mu_1 d_1 + \mu_2 d_2 \]
formülü bulunabilir. Üstteki formülü matris notasyonunda tekrar düzenlemek mümkündür,
\[ [\begin{array}{ccc} -r & d_1 & d_2 \end{array}] \left[\begin{array}{ccc} \lambda \\ \mu_1 \\ \mu_2 \end{array}\right] = s - p_0 \]
Dikkat, \(-r,d_1,d_2\) vektör oluşturmuş gibi gözüküyor ama böyle değil, bu değişkenlerin her birinin kendisi vektör, onların değerlerinin asağı doğru açılmış hali solda bir matris yaratıyor, o matrise \(A\) diyelim, yani
\[ \left[\begin{array}{ccc} \uparrow & \uparrow & \uparrow \\ -r & d_1 & d_2 \\ \downarrow & \downarrow & \downarrow \end{array}\right] \left[\begin{array}{ccc} \lambda \\ \mu_1 \\ \mu_2 \end{array}\right] = s - p_0 \]
\[ A \left[\begin{array}{ccc} \lambda \\ \mu_1 \\ \mu_2 \end{array}\right] = s - p_0 \]
Sistemi çözmek için
\[ \left[\begin{array}{ccc} \lambda \\ \mu_1 \\ \mu_2 \end{array}\right] = A^{-1} (s - p_0) \]
Yani \(A\)’nin tersini alıp eşitliğin sağ tarafını soldan çarpınca kesişme noktasındaki \(\lambda,\mu_1,\mu_2\) elde ediliyor.
Bu değerleri kullanarak kesişme noktasının kordinat yerini artık bulabiliriz, mesela çizgi parçası formülünden yola çıkarsak \(x = s + \lambda (t-s)\) formülüne bulunan \(\lambda\) değerini sokunca, ki \(t,s\) zaten biliniyor, kesişim noktası \(x\) elde edilebilir.
Önemli bir nokta eğer kesişme yoksa üstteki çözümün ne vereceği. Bu durumda \(A\) matrisi özgün (singular) olur, yani tersi alınamaz. O zaman eğer bir lineer cebir paketi kullanıyorsak bir hata mesajı alırız. Tabii özgünlüğün basit bir kontrol yöntemi var, \(A\)’nin determinantını alırız, eğer sıfır ise matris özgündür, çözüm / kesişme yoktur.
Bu hesabın farklı bazı ekleri için raytri.c koduna
bakılabilir.
Not: Üstteki kod ve [9] lineer cebir sistemini Cramer’in Kuralı ile çözüyor, o cebirsel açılım sırasında ortaya çıkan determinantlar kullanılıyor. Detaylar için koda ve kaynağa başvurulabilir.
Örnek
Gerekli grafik rutinleri,
import mpl_toolkits.mplot3d as a3
import matplotlib.colors as colors
import pylab as pl
import numpy as np
def plot_tri3d(corners, axx):
tri = a3.art3d.Poly3DCollection([corners])
tri.set_edgecolor('k')
tri.set_color('red')
tri.set_alpha(0.2)
axx.add_collection3d(tri)
axx.view_init(elev=20, azim=250)
axx.set_xlim(-5,8)
axx.set_ylim(-5,8)
axx.set_zlim(-5,8)
def plot_line(p0,p1,axx):
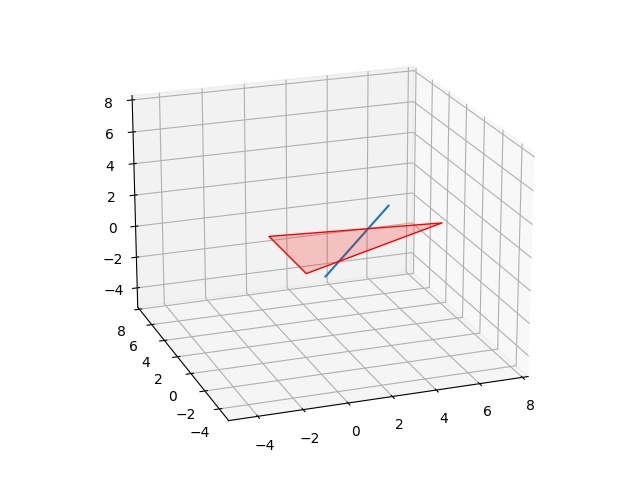
axx.plot([p0[0],p1[0]],[p0[1],p1[1]],[p0[2],p1[2]]) Bir çizgi parçası ve bir üçgen yaratalım,
vtx1 = np.array([[0,5,0],[8,4,0 ],[0,0,0]])
import mpl_toolkits.mplot3d as a3
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
plot_tri3d(vtx1,ax)
s = np.array([2,3,-2])
t = np.array([5,3,2])
plot_line(s,t,ax)
plt.savefig('calc_multi_75_app_14.jpg')
Kesişmeyi bulmak için,
import numpy.linalg as lin
r = t - s
d1 = vtx1[1,:]-vtx1[0,:]
d2 = vtx1[2,:]-vtx1[0,:]
A = np.zeros((3,3))
A[:,0] = -r
A[:,1] = d1
A[:,2] = d2
print ('A',A)
print (u'A determinantı', lin.det(A))
res = np.dot(lin.inv(A),(s-vtx1[0,:]))
lam,mu1,mu2 = list(res)A [[-3. 8. 0.]
[ 0. -1. -5.]
[-4. 0. 0.]]
A determinantı 159.99999999999994print (mu1,mu2,mu1+mu2)
xintersect = s + lam * (t-s)
print (u'kesişme noktası',xintersect)0.4375 0.3125 0.75
kesişme noktası [3.5 3. 0. ]fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
plot_tri3d(vtx1,ax)
plot_line(s,t,ax)
ax.plot(xintersect[0],xintersect[1],xintersect[2],'rd')
plt.savefig('calc_multi_75_app_15.jpg')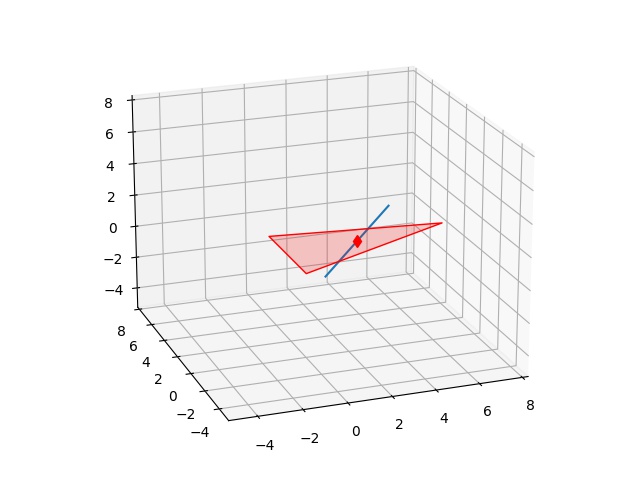
Örnek
Kesişmenin olmadığı bir örneğe bakalım,
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
plot_tri3d(vtx1,ax)
s = np.array([-3,4,3])
t = np.array([0,0,3])
r = t - s
A = np.zeros((3,3))
A[:,0] = -r
A[:,1] = d1
A[:,2] = d2
print ('A',A)
print ('A determinant', lin.det(A))
plot_line(s,t,ax)
plt.savefig('calc_multi_75_app_16.jpg')A [[-3. 8. 0.]
[ 4. -1. -5.]
[ 0. 0. 0.]]
A determinant 0.0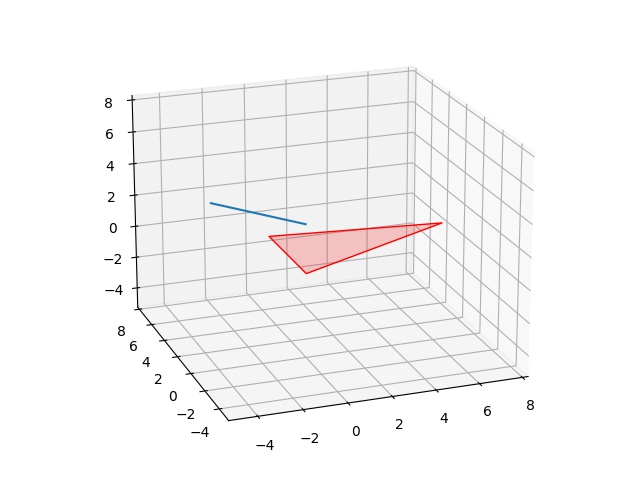
İki 3D Üçgenin Hızlı Kesişme Kontrolü
Üç boyutta iki üçgenin hızlı bir kesişme kontrolü için, ya da kesişmeme durumunda kesişme ihtimalini hızlı bir şekilde eleyebilmek için [7] bir yöntem nokta / düzlem [8] mesafe mantığını kullanmak. Bu yöntemde verili iki üçgen var diyelim, \(T_1\), ki \((u_0,u_1,u_2)\) köşelerinden oluşuyor, ve \(T_2\), ki \((v_0,v_1,v_2)\) köşelerinden oluşuyor, ikinci üçgen için önce üç noktanın ima ettiği düzlemi oluştururuz.
\[ n_2 = (v_1-v_0) \times (v_2 - v_1) \]
\[ d_2 = -n_2 \cdot v_0 \]
Sonra \(T_1\)’in tüm köşelerinden bu düzleme olan işaretli mesafeyi hesaplarız.
\[ m_i = n_2 \cdot u_i + d_2 \]
Eğer tüm \(m_i < 0\) ya da tüm \(m_i > 0\) ise, bu üçgen / üçgen kesişmesinin olmadığı sonucuna varabiliriz. Bu hızlı, kabaca yapılan bir ilk test olarak faydalı olabilir.
Yöntem direk üçgen / üçgen bazında bir test değildir, üçgen noktaları ve diğer üçgenin olduğu düzlem bazında bir testtir fakat kesişme olmadığı durumda muhakkak kesişme olmadığı sonucuna hızlıca varabildiği için tercih edilen bir ilk test olabilir. Anlatımda biraz karışıklık olduysa açmaya uğraşalım, üstteki test kesişme olmadığı her zaman negatif sonuç verir. Fakat negatif sonuç alınmadıysa bu illa kesişme olduğu anlamına gelmez. Metot negatif sonuçlarda yüzde yüz başarılı, bu sebeple kesişme eleme fazında yardımcı olur, kesin kesişme sonucuna varmak için farklı yöntemler gerekir, mesela daha önce paylaşılan çizgi / üçgen kesişme yaklaşımı gibi.
Örnek
vtx1 = np.array([[0,5,0],[8,0,0 ],[0,0,0]])
vtx2 = np.array([[6,8,3],[6,8,-2],[6,-4,-2]])
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
plot_tri3d(vtx1,ax)
plot_tri3d(vtx2,ax)
plt.savefig('calc_multi_75_app_12.jpg')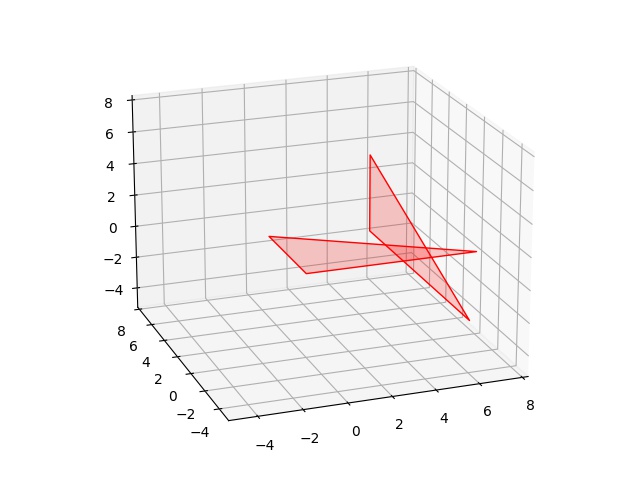
# ikinci ucgen ile duzlem yarat
n2 = np.cross( vtx2[1,:]-vtx2[0,:], vtx2[2,:]-vtx2[0,:] )
d2 = -np.dot(n2,vtx2[0,:])
print (n2,d2)[-60 0 0] 360for i in range(3):
sdi = np.dot(n2,vtx1[i,:])+d2
print ('%d. noktaya uzaklik = %d' % (i,sdi))0. noktaya uzaklik = 360
1. noktaya uzaklik = -120
2. noktaya uzaklik = 360Örnek
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
vtx3 = vtx2 + 3
plot_tri3d(vtx1,ax)
plot_tri3d(vtx3,ax)
plt.savefig('calc_multi_75_app_13.jpg')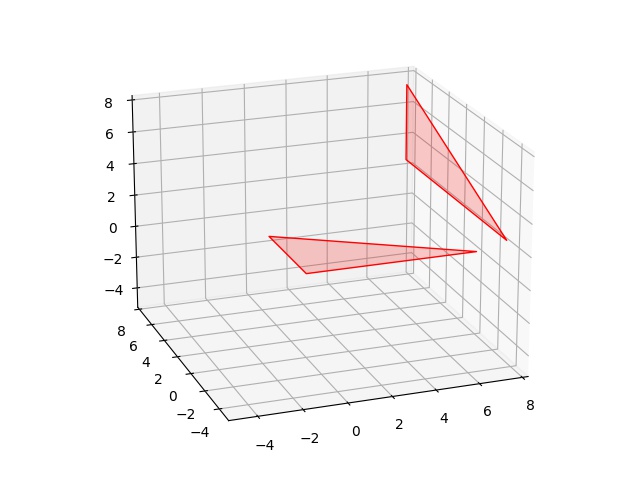
# ucuncu ucgen ile duzlem yarat
n3 = np.cross( vtx3[1,:]-vtx3[0,:], vtx3[2,:]-vtx3[0,:] )
d3 = -np.dot(n3,vtx3[0,:])
print (n3,d3)[-60 0 0] 540for i in range(3):
sdi = np.dot(n2,vtx1[i,:])+d3
print ('%d. noktaya uzaklik = %d' % (i,sdi))0. noktaya uzaklik = 540
1. noktaya uzaklik = 60
2. noktaya uzaklik = 540Daha detaylı kod muller.c ve muller.py
dosyalarında bulunabilir.
Çizgi Düzlem Kesişmesini Vektörler ile Hesaplamak
Üstteki yöntem cebirsel manipülasyon gerektiriyor, fakat sayısal hesap için sembolik cebir işlemlerine girmeden vektör matematiği ile direk bir sonuç bulamaz mıyız? [3,4]’ü temel alalım: alttaki durumu düşünelim,
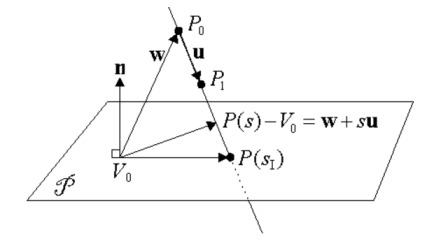
Grafiğe göre \(P(s)\) \(P_1\) ve \(P_0\) arasındaki birim vektörün \(s\) kadar uzatılmış hali olsun, o aralığı \(u\) kabul edersek \(P(s)-V_0 = w + su\) olur. Düzlem ile kesişmenin olduğu noktayı \(P(s_I)\) diye tanımlayalım, aradığımız nokta burası. O noktada \(n\) ile \(P(s_I)\) dikgen olacaktır, yani \(P(s) - V_0 = w + su\) vektörü \(n\)’e dikgen olacaktır, ki \(w=P_0-V_0\). Bu durumda \(n \cdot (w+su) = 0\) olur. Bunu kullanarak,
\[ s_I = \frac{-n \cdot w}{n \cdot u} = \frac{n \cdot (V_0 - P_0)}{n \cdot (P_1-P_0)} = \frac{-(ax_0 + by_0 + cz_0 + d)}{n \cdot u} \]
n = np.array([1., 1., 1.])
V0 = np.array([1., 1., -5.])
P0 = np.array([-5., 1., -1.])
P1 = np.array([1., 2., 3.])
w = P0 - V0;
u = P1-P0;
N = -np.dot(n,w);
D = np.dot(n,u)
sI = N / D
I = P0+ sI*u
print (I)[-3.90909091 1.18181818 -0.27272727]Grafiklersek
import sys; sys.path.append('../../phy/phy_072_rot')
import plot3d
fig, ax = plt.subplots(1, 1, subplot_kw={'projection': '3d'})
w = 10
ax.set_xlim(-w,w);ax.set_ylim(-w,w);ax.set_zlim(-w,w)
ax.set_xlabel("X")
ax.set_ylabel("Y")
ax.set_zlabel("Z")
v = P1-P0
ax.quiver(P0[0], P0[1], P0[2], v[0], v[1], v[2], color='red')
ax.scatter(V0[0], V0[1], V0[2], color='black')
ax.scatter(V0[0]+n[0], V0[1]+n[1], V0[2]+n[2], color='black')
ax.scatter(I[0], I[1], I[2], color='black')
ax.quiver(V0[0], V0[1], V0[2], n[0], n[1], n[2], color='blue')
plot3d.plot_plane(ax, list(V0), list(n), color='y')
plt.savefig('calc_multi_75_app_07.jpg')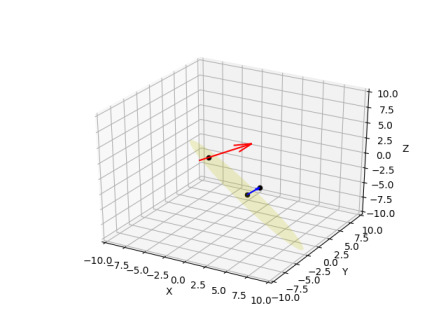
Green’in Teorisi, Uzaklaşım, Stokes, Yol ve Çizgi Entegralleri
Yüzeyler (Surfaces)
Üç boyut içindeki iki boyut yüzeyler parametrize edilerek gösterilir, tek boyutlu eğri bir parametre \(t\) ile parametrize ediliyordu, alan için iki değişken \(u,v\) gerekir. Notasyonel olarak \(r\)’nin taradığı bir yüzey
\[ r(u,v) = < x(u,v), y(u,v), z(u,v) > \]
Mesela \(r(u,v) = < u, u^2, v >\) bir yüzey olabilir.
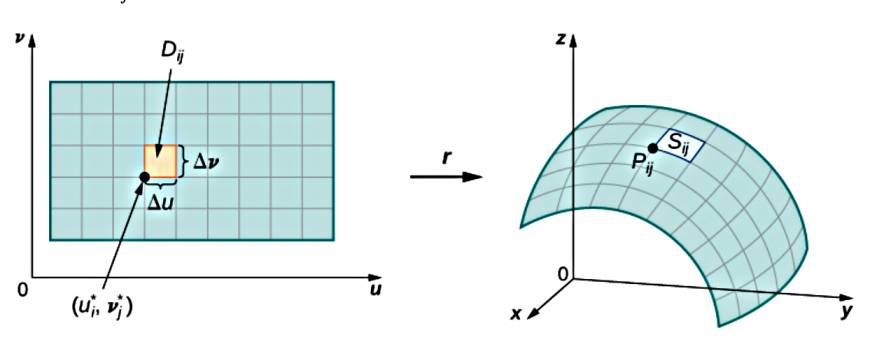
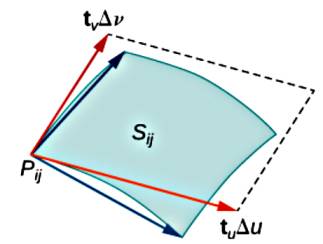
Yüzey alan hesabı için tüm yüzeyi kenarları \(\Delta u\), \(\Delta v\) olan hücreler yaratabiliriz. Her noktada iki tane teğet vektör bulunabilir, bunlar \(t_u\) ve \(t_v\) olsun,
\[ t_u = < \frac{\partial x}{\partial u}, \frac{\partial y}{\partial u}, \frac{\partial z}{\partial u} >, \quad t_v = < \frac{\partial x}{\partial v}, \frac{\partial y}{\partial v}, \frac{\partial z}{\partial v} > \]
Yaklaşık olarak her hücrenin alanı \(\Delta S_{ij}\) her hücredeki \(t_u\) ve \(t_v\) (ya da yeni notasyonla onlara \(t_u^{ij}\) ve \(t_v^{ij}\) diyelim) yönündeki \(\Delta u\) ve \(\Delta v\)’nin oluşturduğu paralelogram alanıdır, bu paralelogram bildiğimiz gibi iki vektörün çapraz çarpımından gelen üçüncü vektörün büyüklüğüdür, o zaman
\[ \Delta S_{ij} \approx || \Delta u t_u^{ij} \times \Delta v t_v^{ij} || \]
\[ = || t_u^{ij} \times t_v^{ij} || \Delta u \Delta v \]
Tüm ufak hücre alanlarını toplarız, ve hücre sayısı sonsuza yaklaşırken toplam alan limitine bakabiliriz,
\[ \lim_{m,n \to \infty} \sum_{i=1}^{m} \sum_{j=1}^{n} || t_u^{ij} \times t_v^{ij} || \Delta u \Delta v \]
Bu limit yüzey alan çift entegral hesabına yaklaşır / onu tanımlar, [2, sf. 769],
\[ = \iint_D || t_u \times t_v || \mathrm{d} u \mathrm{d} v = \iint_D || t_u \times t_v || \mathrm{d} A \]
Yüzey Entegrali (Surface Integral)
Yukarıda gördüklerimiz parametrize edilmiş yüzeyin alanını hesaplamak içindir. Yüzey entegrali bir yüzey üzerinden alınan entegrallere verilen isimdir, mesela tek sayı / skalar değerli bir fonksiyon \(f\)’nin pürüzsüz bir yüzey \(S\) üzerinden alınan yüzey entegrali, o fonksiyonun her noktadaki alan büyüklüğü ile çarpılıp sonuçların toplanmasıdır, cebirsel olarak yine \(t_u,t_v\) kavramlarını kullanırsak,
\[ \iint_S f(x,y,z) \mathrm{d} S = \lim_{m,n \to \infty} \sum_{i=1}^{m} \sum_{j=1}^{n} f(P_{ij}) || t_u^{ij} \times t_v^{ij} || \Delta u \Delta v \]
\[ = \lim_{m,n \to \infty} \sum_{i=1}^{m} \sum_{j=1}^{n} f(P_{ij}) \Delta S_{ij} \]
O zaman yüzey entegralleri alttaki şekilde hesaplanabilir,
\[ \iint_S f(x,y,z) \mathrm{d} S = \iint_D f(r(u,v)) || t_u \times t_v || \mathrm{d} A \]
Çizgi entegrali (line integrals) daha düşük boyuttaki benzer bir kavram idi.
Vektör Alanları Üzerinden Yüzey Entegrali
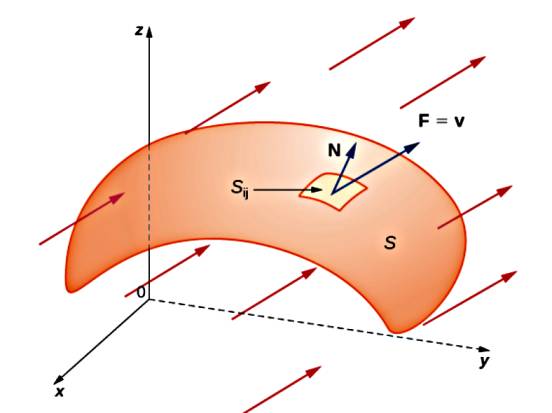
Skalar fonksiyona benzer şekilde bir vektör alanı \(F\) ve yüzey \(S\) üzerinden de entegral hesaplanabilir. Yine bir ufak çarpımlar toplamından bahsediyoruz, bu tür bir hesap pek çok uygulama için faydalı olabilir. Mesela bir su akışı içindeki geçirgen bir yüzeyi düşünürsek, kütle akışını (mass flux) nasıl hesaplarız?
Her noktada yüzey \(S\)’ye dik olan alan \(N\) olsun, her noktadaki akış hızı \(v\) diyelim, o zaman bir noktadaki birim zaman ve birim alandaki kütle akışı \(\rho v \cdot N\). Ölçüm birimlerini kontrol edelim, hız \(m/s\), yoğunluk \(\rho\) \(g/m^3\), çarparsak \(g/s \cdot m^2\) elde ederiz, yani birim alan ve zamandaki kütle akışı.
Şimdi \(\rho v \cdot N\) değerini \(\Delta S_{ij}\) ile çarparsak \(S\) üzerindeki hayali ufak hücreden birim zamanda akan kütleyi buluruz, tüm bu akışları toplarız,
\[ \sum_{i=1}^{m} \sum_{j=1}^{n} (\rho v \cdot N) \Delta S_{ij} \]
Tüm akışı elde etmiş oluruz. Izgara hücreleri \(S_{ij}\) ufaldıkça üstteki toplam gerçek kütle akışına yaklaşır, yani
\[ \iint_S \rho v \cdot N \mathrm{d} S = \lim_{m,n \to \infty} \sum_{i=1}^{m} \sum_{j=1}^{n} (\rho v \cdot N) \Delta S_{ij} \]
Devam edelim \(\rho v\) yerine herhangi bir vektör alanı \(F\) kullanalım, o zaman şu genel tanımı artık yapabiliriz, \(F\)’nin \(S\) yüzeyi üzerinden entegrali
\[ \iint_S \vec{F} \cdot \mathrm{d} \vec{S} = \iint_S \vec{F} \cdot \vec{N} \mathrm{d} S \]
olarak gösterilir.
Dikkat her yerde vektör notasyonu kullanmıyoruz, olmadığı yerde formül çerçevesine göre anlaşılabilir.
\(N\) yüzey normalı, öne dik olan birim vektör, hesabı için önceden gördüğümüz \(t_u,t_v\) vektörlerini kullanabiliriz,
\[ N = \frac{t_u \times t_v}{ || t_u \times t_v || } \]
Üstteki ifadeyi yüzey entegralinde kullanırsak [2, sf. 778],
\[ \iint_S \vec{F} \cdot \vec{N} \mathrm{d} S = \iint_S \vec{F} \cdot \frac{t_u \times t_v}{ || t_u \times t_v || } \mathrm{d} S \]
Daha önce gördük
\[ \mathrm{d} S = || t_u \times t_v || \mathrm{d} u \mathrm{d} v = || t_u \times t_v || \mathrm{d} A \]
İki üste geçirince
\[ = \iint_D \vec{F}(r(u,v)) \cdot \frac{t_u \times t_v}{ || t_u \times t_v || } || t_u \times t_v || \mathrm{d} A \]
Basitleştirme sonrası,
\[ = \iint_D \vec{F}(r(u,v)) \cdot (t_u \times t_v) || t_u \times t_v || \mathrm{d} A \]
Soru
\(F = < -y, x, 0 >\) olarak veriliyor, \(S\) yüzeyi \(r(u,v) = < u, v^2 - u, u+v >\).
\(\iint_S F \cdot N \mathrm{d} S\) yüzey entegralini hesaplayın.
Cevap
Teğet vektörler \(t_u = < 1, -1, 1 >\), ve \(t_v = < 0, 2v, 1 >\).
\(t_u \times t_v\) çapraz çarpımı
import sympy
u,v = sympy.symbols('u v')
t_u = sympy.Matrix([[1,-1,1]])
t_v = sympy.Matrix([[0,2*v,1]])
print (t_u.cross(t_v))Matrix([[-2*v - 1, -1, 2*v]])Yüzey entegral hesabı şöyle hesaplanabilir,
\[ \int _{0}^{4} \int _{0}^{3} F(r(u,v)) \cdot (t_u \times t_v) \mathrm{d} u \mathrm{d} v \]
Verili \(F = < -y, x, 0 >\), ve yüzey \(r(u,v) = < u, v^2 - u, u+v >\) demiştik, o zaman
\[ F(r(u,v)) = < u-v^2, u, 0 > \]
olur. Tüm entegral
\[ = \int _{0}^{4} \int _{0}^{3} < u-v^2, u, 0 > \cdot < -1-2v, -1, 2v > \mathrm{d} u \mathrm{d} v \]
\[ = \int_{0}^{4} \int_{0}^{3} (2v^3 + v^2 -2uv -2u ) \mathrm{d} u \mathrm{d} v \]
\[ = \int_{0}^{4} [ 2v^3u + v^2u - vu^2 - u^2 ]_{0}^{3} \mathrm{d} v \]
\[ = \int_{0}^{4} (6v^3 + 3v^2 - 9v -9 ) \mathrm{d} v \]
\[ = \left[ \frac{3v^4}{2} + v^3 - \frac{9v^2}{2} - 9v \right]_{0}^{4} \]
\[ = 340 \]
from mpl_toolkits.mplot3d import Axes3D
from matplotlib import cm
import numpy as np
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
u = np.linspace(0, 3, 100)
v = np.linspace(0, 4, 100)
u,v = np.meshgrid(u,v)
x = u; y = v**2 - u; z = u + v
ax.plot_surface(x, y, z, rstride=4, cstride=4, cmap = cm.copper)
x = np.linspace(0, 3, 5)
y = np.linspace(0, 10, 5)
z = np.linspace(0, 6, 5)
fu = -y; fv = x; fw = z*0
xx,yy,zz = np.meshgrid(x,y,z)
ax.quiver(xx, yy, zz, fu, fv, fw, length=0.2, color = 'red')
ax.view_init(elev=18, azim=-46)
plt.savefig('calc_multi_75_app_03.jpg')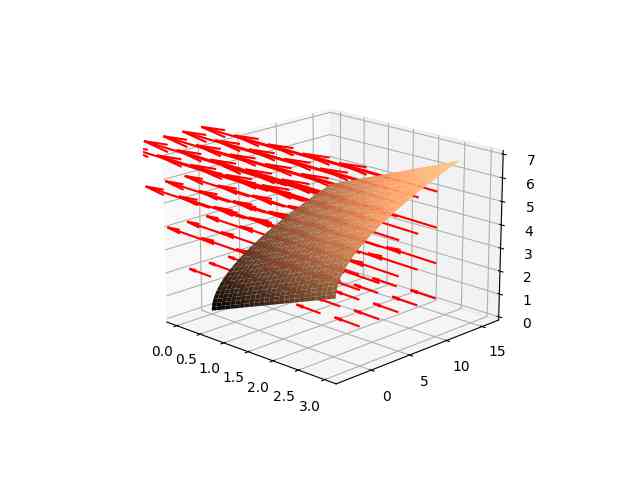
Çizgi Düzlem Kesişmesi
Elimizde \(P = 2x + y - 4z = 4\) düzlemi var. Bu düzlemin
\[ x = t \quad y = 2 + 3t \quad z = t\]
çizgisi ile kesiştiği yer neresidir?
Cevap kolay; çizgi denkleminde \(t\) bazlı tanımlı \(x,y,z\) değerleri \(P\)’ye sokarsak, tek bilinmeyeni \(t\) olan bir denklem çıkar,
\[ 2(t) + (2+3t)-4(t) = 4 \Rightarrow t = 2\]
İki Nokta Arasında Parametrize Edilmiş Eğri
Diyelim ki \((1,1)\) ve \((4,4)\) noktalarından geçen ve dışarıdan tanımlı parametrelerle yeterince eğilip, bükülebilecek bir eğri tanımlamamız lazım. Polinomlar üzerinden tanımlanan bir eğri ile bunu başarabiliriz,
\[ x(t) = a_0 + a_1 t + a_2 t^2 + a_3 t^3 \]
\[ y(t) = b_0 + b_1 t + b_2 t^2 + b_3 t^3 \]
Bu şekilde bir eğri yeterince eğilip bükülebilir, ve istenen şekle sokulabilir. Fakat baş ve sonun verili noktalardan geçmesini nasıl garanti ederiz? Bunun için bu noktaları üstteki denkleme sokalim, ve \(0 \le t \le 1\) olacak sekilde kısıtlama yapalim, \(t=0\)’da
\[ 1 = a_0 + a_1 (0) + a_2 (0)^2 + a_3 (0)^3 \]
\[ 1 = b_0 + b_1 (0) + b_2 (0)^2 + b_3 (0)^3 \]
Yani \(a_0=1\) ve \(b_0=1\). Peki \(t=1\) icin?
\[ 4 = 1 + a_1 (1) + a_2 (1)^2 + a_3 (1)^3 \]
\[ 4 = 1 + b_1 (1) + b_2 (1)^2 + b_3 (1)^3 \]
\[ 3 = a_1 + a_2 + a_3, \quad 3 = b_1 + b_2 + b_3 \]
Demek ki üstteki iki formüle mutabık kaldığımız sürece \(a_1,a_2,a_3,b_1,b_2,b_3\) ie istediğimiz şekilde oynayarak istediğimiz eğriyi ortaya çıkartabiliriz.
t = np.linspace(0,1.0,100)
a1,a2 = -1.1, 1.9
b1,b2 = 1.1, 1.4
sx,sy=(1.0,1.0)
ex,ey=(4.0,4.0)
a3 = ex - sx - (a1+a2)
b3 = ey - sy - (b1+b2)
x = 1.0 + a1*t + a2*t**2 + a3*t**3
y = 1.0 + b1*t + b2*t**2 + b3*t**3
plt.xlim(0,5.0)
plt.ylim(0,5.0)
plt.plot(x,y)
plt.savefig('calc_multi_75_app_08.jpg')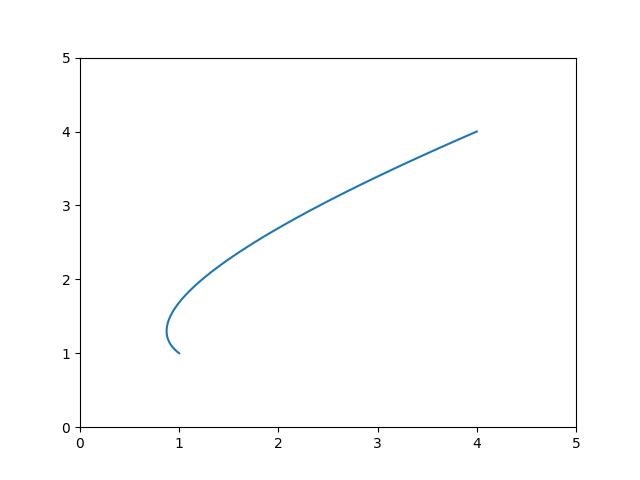
Max ve Sigmoid Bazlı Yaklaşım
Daha önce [6]’da görülen spline tekniğinin parametrik hali de olabilir. Mesela
ax, bx, cx, dx = (1, -1.4, 2, 2.5)
ay, by, cy, dy = (1, 1.4, 1, 2.5)
def f(t):
x = ax + \
bx*np.max([0,t-2]) + \
cx*np.max([0,t-3]) + \
dx*np.max([0,t-4])
y = ay + \
by*np.max([0,t-2]) + \
cy*np.max([0,t-3]) + \
dy*np.max([0,t-4])
return x,y
tmp = np.linspace(0,5,100)
res = np.array([f(tt) for tt in tmp])
plt.plot(res[:,0],res[:,1])
plt.savefig('calc_multi_75_app_09.jpg')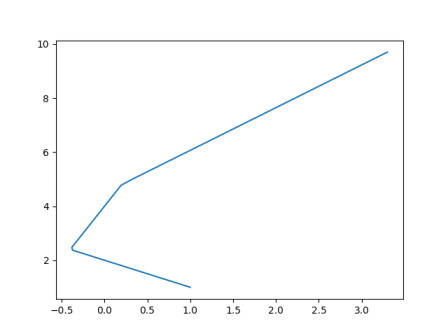
Başlangıcı \(a_x,a_y\) olan kesik bir eğriyi görüyoruz. Bu tür eğrileri aynen [6]’da olduğu gibi sigmoid bazlı yapabiliriz,
rho = 7.0
def sig(x,a):
return (x-a)*1/(1+np.exp(-rho*(x-a)))
def maxk(x,a):
return np.max([0,x-a])
ax,bx,cx,dx,ex = (1, 2.4, 1, -3.5, -2.1)
ay,by,cy,dy,ey = (1, 0.4, -0.1, 0.5, -3)
def f(t):
x = ax + \
bx*maxk(t,2) + \
cx*maxk(t,3) + \
dx*maxk(t,3.5) + \
ex*maxk(t,4.0)
y = ay + \
by*maxk(t,2) + \
cy*maxk(t,3) + \
dy*maxk(t,3.5) + \
ey*maxk(t,4.0)
return x,y
def g(t):
x = ax + \
bx*sig(t,2) + \
cx*sig(t,3) + \
dx*sig(t,3.5) + \
ex*sig(t,4.0)
y = ay + \
by*sig(t,2) + \
cy*sig(t,3) + \
dy*sig(t,3.5) + \
ey*sig(t,4.0)
return x,y
tmp = np.linspace(0,5,100)res = np.array([f(tt) for tt in tmp])
plt.plot(res[:,0],res[:,1])
plt.savefig('calc_multi_75_app_10.jpg')res = np.array([g(tt) for tt in tmp])
plt.plot(res[:,0],res[:,1])
plt.savefig('calc_multi_75_app_11.jpg')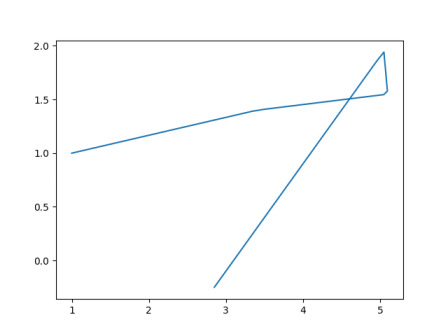
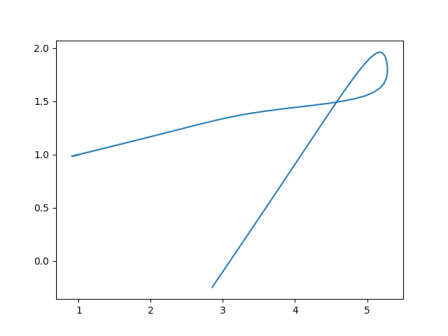
Herhangi bir şekli katsayılarla yaratmak mümkün.
Bitiş noktalasını nasıl ayarlarız? Burada yine polinom örnekteki gibi cebirsel bir yöntem seçebilirdik, fakat çoğunlukla başlangıç ve bitiş arasındaki eğriler bir optimizasyon bağlamında kullanılır. Bu durumda bitiş noktaları ile katsayılar arasında bir optimizasyon kısıtlaması yaratmak ve bitiş noktalarını böyle ayarlamak daha iyidir.
Çünkü biliyoruz parametrize ortamda mesela önceki örnekte \(0 \ge t \ge 5\). O zaman egrinin bitisinde \(t=5\) olacağını biliyoruz. Bu durumda mesela
\[ x = a_x + \ b_x \sigma(t,2) + \ c_x \sigma(t,3) + \ d_x \sigma(t,3.5) + e_x \sigma(t,4.0) \]
ifadesine \(t\) tüm ilmik noktalarının ötesinde olduğu için artık tüm \(\sigma\) ifadeleri 1 veriyor. Eğer 1 veriyorsa, yani tüm sigmoid’ler aktif ise, eğri bitişinde bilinen \(t\) üzerinden elimizdeki \(x\) \(x = a_x + b_x(5-2) + c_x(5-3) + d_x(5-3.5) + e_x(5-4.0)\) olmalı. Optimizasyonda bu eşitliğin belli bir değer (istediğimiz bitiş noktası kordinatı) olmasını şart tutarak amacımız erişebiliriz.
Kaynaklar
[1] Marsden, Vector Calculus
[2] Strang, Calculus Volume 3, OpenStaxa
[3] Sunday, Intersection of Lines and Planes, http://geomalgorithms.com/a05-_intersect-1.html
[4] Khaled, Straight Line and Plane Intersection Matlab Code, https://uk.mathworks.com/matlabcentral/fileexchange/17751-straight-line-and-plane-intersection
[5] Distance between Point and Line, https://brilliant.org/wiki/distance-between-point-and-line/
[6] Bayramlı, Hesapsal Bilim, Spline Eğrileri ve Baz Fonksiyonlar
[7] Rotenberg, CSE169: Computer Animation, https://cseweb.ucsd.edu/classes/wi19/cse169-a/slides/
[8] Bayramlı, Çok Değişkenli Calculus - Ders 4
[9] Bergen, Collision Detection